





























56 Program features
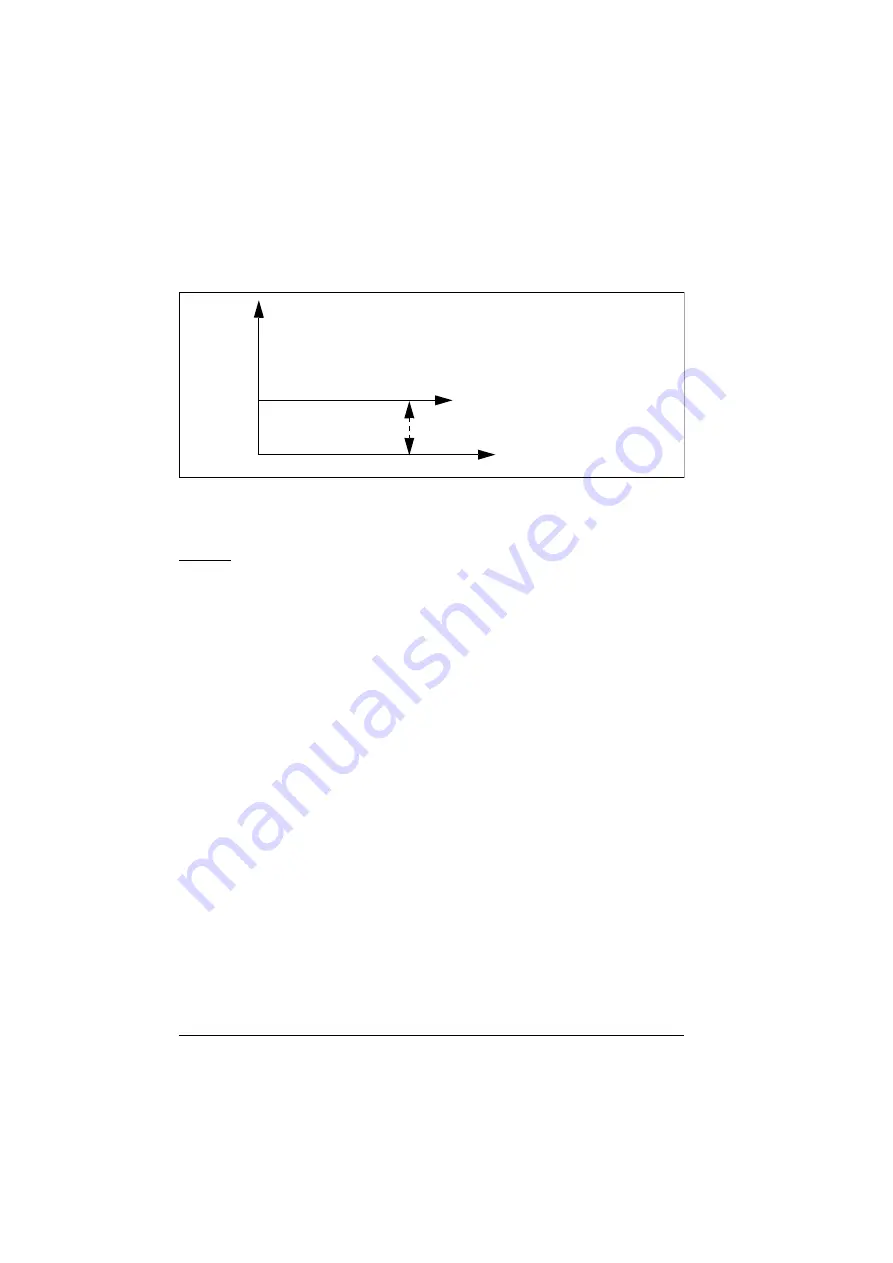
The below graph shows the PID trim output in direct mode throughout the speed
range. A fixed trim speed reference is added throughout the speed range.
Note:
In the above graph, it is assumed that the PID output is limited/stable at 100.
This is for understanding purpose only. In real case scenario, PID output can vary
based on the setpoint and actual.
Example
If,
=
= 1500 rpm
= 100 (limited to 100)
= 0.5
Then,
Proportional
The proportional method is suitable for applications where tension control is required
throughout the speed range but not near to zero speed.
In this mode, the PID trimmed output (
) is relative to
the reference selected by parameter
and with
or
It is recommended that the speed reference selected in
and the reference source selected in
and
are same. This is required to make the proportional mode active.
In most of the use cases, the process speed reference is connected in
. For example, if EXT1 control mode is used and the reference
ct
Drive speed reference
0
Par40.05
100
100
----------
1500 0.5
=
Par40.05
750
=
Содержание ACS560
Страница 1: ...ABB GENERAL PURPOSE DRIVES ACS560 standard control program Firmware manual...
Страница 4: ...4...
Страница 30: ...30 Start up control with I O and ID run...
Страница 32: ...32 Using the control panel...
Страница 100: ...100 Program features...
Страница 153: ...Control macros 153...
Страница 160: ...160...
Страница 374: ...374 Parameters...
Страница 408: ...408 Additional parameter data...
Страница 466: ...466 Fieldbus control through the embedded fieldbus interface EFB...
Страница 504: ...504 Control chain diagrams...
Страница 508: ...508 Parameterization with drive composer...
Страница 512: ...512 Parameterization with automation builder drive manager...







































































