
























4.4 External Dimensions
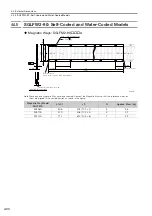
4.4.3 SGLFW2-90: Self-Cooled Models
4-26
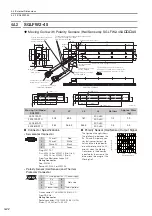
Moving Coils without Polarity Sensors (Hall Sensors): SGLFW2-
90A
AT1
Connector Specifications
Polarity Sensor (Hall Sensor) Output Signal
•
Servomotor Connector
The figure on the right shows
the relationship between the
Su, Sv, and Sw polarity sen-
sor (hall sensor) output sig-
nals and the inverse power of
each motor phase Vu, Vv,
and Vw when the Moving
Coil moves in the direction
indicated by the arrow in the
dimensional drawings of the
Moving Coil.
Tab housing: 1-917808-2
Contacts: 917803-2 (A1, A2, and B1)
84695-1 (B2)
From Tyco Electronics Japan G.K.
Mating Connector
Receptacle housing: 1-917807-2
Contacts: 179956-2
•
Polarity Sensor (Hall Sensor) and Thermal
Protector Connector
Pin connector: 17JE-23090-02 (D8C) -CG
From DDK Ltd.
Mating Connector
Socket connector: 17JE-13090-02 (D8C) A-CG
Studs: 17L-002C or 17L-002C1
Vu
Vv
Vw
Su
Sv
Sw
0
180
360
540
Electrical angle (°)
Inverse power (V)
A1
B1
B2
A2
A1
Phase U
Red
A2
Phase V
White
B1
Phase W
Black
B2
FG
Green
9
6
5
1
1
+5 V (thermal protector), +5 V (power supply)
2
Su
6
Not used
3
Sv
7
4
Sw
8
5
0 V (power supply)
9
Thermal protector
60 min.
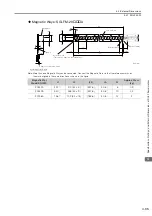
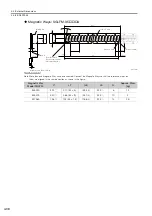
Magnetic Way
Servomotor Main
Circuit Cable
UL2586, AWG12
Thermal protector cable
UL1333, AWG20
(10.5 dia.)
The Moving Coil moves in the direction
indicated by the arrow when current flows in
the following phase sequence: U, V, W.
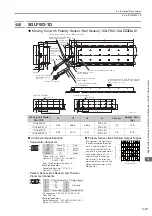
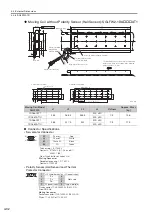
Unit: mm
Thermal protector connector
Servomotor connector
SGLFW2-90A560AT
60.5
89.5
447.5 (89.5 × 5)
59.5
91
14.5
30
30
15
18 × M6 × 11.5
91
15
14.5
60.5
89.5
59.5
30
30
6 × M6 × 11.5
91
14.5
59.5
60.5
89.5
268.5 (89. 5 × 3)
30
30
15
12 × M6 × 11.5
SGLFW2-90A200AT
SGLFW2-90A380AT
(60)
(60)
120
(11.2)
45
15
±0.1
91
114.5
14.5
50±0.1
2
(36)
38±0.1
(6)
15
(0.5)
30
30
(9)
L4
Gap 0.8
48.5
(55)
L1
L2
12
100
±20
L3
Refer to the following figures
,
, and
.
Refer to the following table.