





























8-28 Trio BASIC Commands
Motion and Axis Commands
Trio Motion Technology
DATUM
Type:
Command
Syntax:
DATUM(sequence no)
Description:
Performs one of 7 datuming sequences to locate an axis to an absolute position. The
creep speed used in the sequences is set using
CREEP
. The programmed speed is set
with the
SPEED
command.
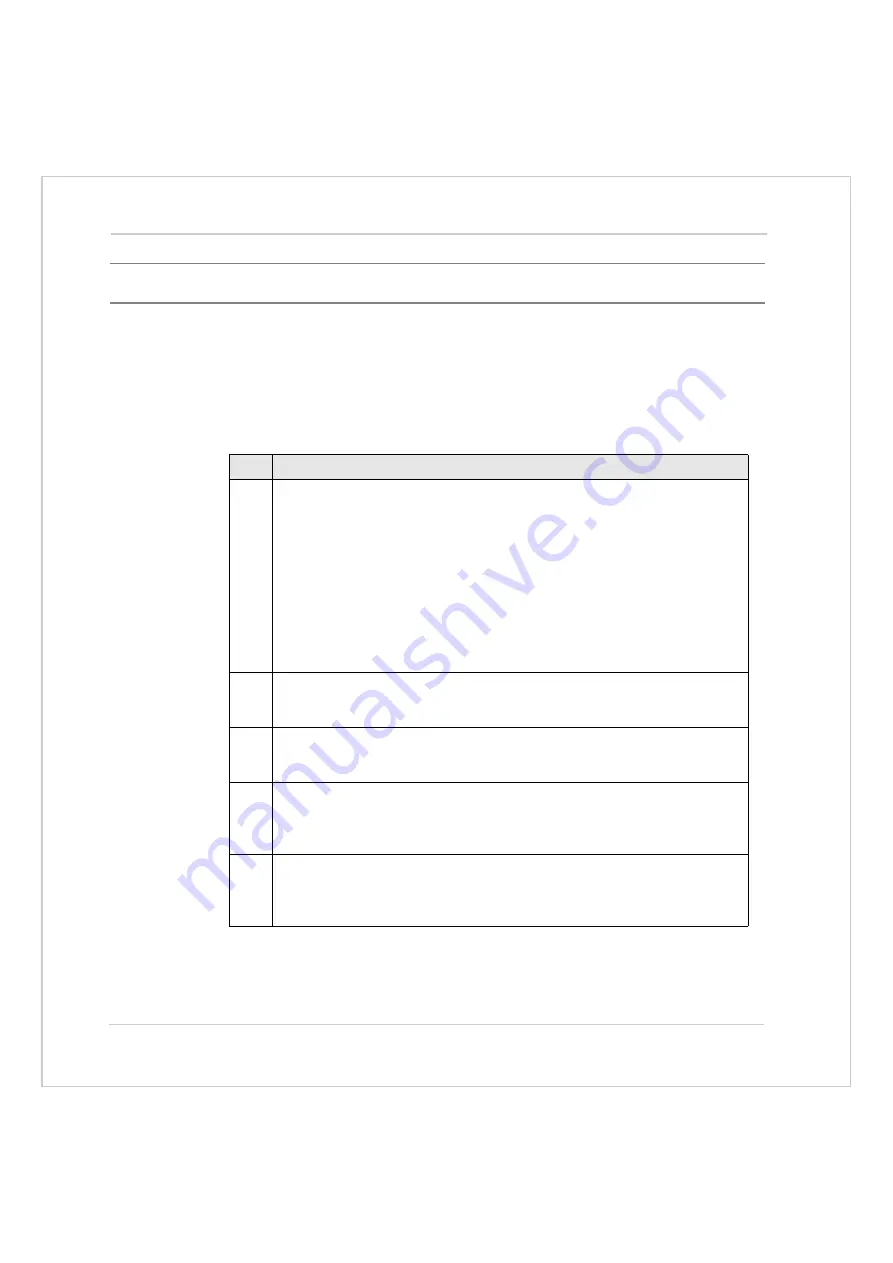
Parameter:
Seq.
Description
0
The current measured position is set as demand position (this is espe-
cially useful on stepper axes with position verification).
DATUM(0) also clears the following error exceeded FE_LIMIT condition in
the
AXISSTATUS
register for ALL axes. It sets these bits in
AXISSTATUS
to
zero:
BIT 1 Following Error Warning
BIT 2 Rmote Drive Comms Error
BIT 3 Remote Drive Error
BIT 8 Following Error Limit Exceeded
BIT 11 Cancelling Move
1
The axis moves at creep speed forward till the Z marker is encountered.
The Demand position is then reset to zero and the Measured position cor-
rected so as to maintain the following error.
2
The axis moves at creep speed in reverse till the Z marker is encoun-
tered. The Demand position is then reset to zero and the Measured posi-
tion corrected so as to maintain the following error.
3
The axis moves at the programmed speed forward until the datum switch
is reached. The axis then moves backwards at creep speed until the
datum switch is reset. The Demand position is then reset to zero and the
Measured position corrected so as to maintain the following error.
4
The axis moves at the programmed speed reverse until the datum switch
is reached. The axis then moves at creep speed forward until the datum
switch is reset. The Demand position is then reset to zero and the Meas-
ured position corrected so as to maintain the following error.
Summary of Contents for Motion Coordinator Euro 205
Page 4: ......
Page 11: ...C H A P T E R CHAPTER0INTRODUCTION...
Page 12: ......
Page 27: ...C H A P T E R CHAPTER0HARDWARE OVERVIEW...
Page 28: ......
Page 35: ...Motion Coordinator Technical Reference Manual Hardware Overview 2 9 Motion Coordinator MC202...
Page 75: ...C H A P T E R CHAPTER0INSTALLATION...
Page 76: ......
Page 88: ...3 14 Installation EMC Considerations Trio Motion Technology...
Page 89: ...C H A P T E R CHAPTER0DAUGHTER BOARDS...
Page 90: ......
Page 126: ...4 38 Daughter Boards Profibus Daughter Board Trio Motion Technology...
Page 127: ...C H A P T E R CHAPTER0EXPANSION MODULES...
Page 128: ......
Page 158: ...5 32 Expansion Modules Communications Adaptors Trio Motion Technology...
Page 159: ...C H A P T E R CHAPTER0SYSTEM SETUP AND DIAGNOSTICS...
Page 160: ......
Page 173: ...C H A P T E R CHAPTER 0PROGRAMMING...
Page 174: ...7 2 Programming Trio Motion Technology...
Page 190: ...7 18 Programming Command Line Interface Trio Motion Technology...
Page 191: ...C H A P T E R CHAPTER0TRIO BASIC COMMANDS...
Page 192: ......
Page 200: ...8 10 Trio BASIC Commands Trio Motion Technology VERIFY 8 178 VFF_GAIN 8 178 VP_SPEED 8 179...
Page 254: ...8 64 Trio BASIC Commands Input Output Commands Trio Motion Technology...
Page 372: ...8 182Trio BASIC Commands Axis Parameters Trio Motion Technology...
Page 373: ...C H A P T E R CHAPTER 0PROGRAMMING EXAMPLES...
Page 374: ......
Page 389: ...C H A P T E R CHAPTER0SUPPORT SOFTWARE...
Page 390: ......
Page 472: ...10 84Support Software Project Autoloader Trio Motion Technology...
Page 473: ...C H A P T E R CHAPTER0FIBRE OPTIC NETWORK...
Page 474: ......
Page 486: ...11 14Fibre Optic Network Network Specification Trio Motion Technology...
Page 487: ...C H A P T E R CHAPTER0USING THE TRIO ACTIVEX CONTROL...
Page 488: ......
Page 518: ...12 32Using the Trio ActiveX Control Events Trio Motion Technology...
Page 519: ...C H A P T E R CHAPTER0COMMUNICATIONS PROTOCOLS...
Page 520: ......
Page 551: ...A P P E N D I X CHAPTER 0REFERENCE...
Page 552: ......





















































