





























Chapter 4 SPAN Operation
CPT7 and CPT7700 Installation and Operation User Manual v12
74
The orientation of the IMU relative to the forward direction of the vehicle is also needed to convert the velocity
and attitude changes sensed by the IMU into the actual motion of the vehicle.
If the SPAN system incorporates other devices, such as a camera connected to an Event Input, the SPAN
system also needs to know the location and orientation of these additional devices relative to the IMU.
4.2.1 Translational Offsets
The three dimensional distances between the IMU and other SPAN components are called translational
offsets.
The translational offsets are measured in three directions, X axis, Y axis and Z axis, typically relative to the
IMU Body frame. Translational offsets can also be entered relative to the Vehicle frame.
The X, Y and Z axes of the IMU Body frame are typically indicated on the IMU enclosure.
The X, Y and Z axes of the IMU Body frame are also indicated on the mechanical drawings of the
IMUs in the
CPT7 Mechanical Specifications
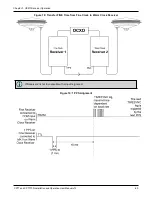
Figure 23: IMU to Antenna Translation Offset
below shows an example of the translational offsets from the
IMU to a GNSS antenna. In this example, the IMU Body Frame (indicated by the small arrows) has the Y axis
pointing in the direction of the vehicle motion and the z axis pointing up.
Figure 23: IMU to Antenna Translation Offset
If the distances measured in this example were X Offset = 1.000 m, Y Offset = 1.500 m and Z Offset = 2.000 m,
the following values would be entered, based on the IMU Body Frame:
l
x = -1.000
l
y = -1.500
l
z = 2.000
The translational offsets are entered using the
SETINSTRANSLATION
command. For this example, the
command to enter these offsets is:
SETINSTRANSLATION ANT1 -1 -1.5 2







































































