





























Chapter 3 OEM7 Receiver Operation
CPT7 and CPT7700 Installation and Operation User Manual v12
51
is more important than absolute accuracy. Because of this, it is well suited for agricultural applications.
Multipath signals tend to induce time varying biases and increase the measurement noise on the L1/L2
pseudorange measurements. Carrier phase measurements are much less susceptible to the effects of
multipath. The GLIDE algorithm fuses the information from the L1 code and the L1 phase measurements into
a Position Velocity Time (PVT) solution.
GLIDE includes settings for a dynamic mode, a static mode and an “auto” mode, where the filtering
parameters are automatically adjusted as vehicle velocity varies between stationary and dynamic states.
3.4.1 Dual-Frequency GLIDE
NovAtel’s dual-frequency GLIDE technology adds to the superior pass-to-pass performance provided by
single-frequency GLIDE. Dual-frequency GLIDE is ideal for agricultural and machine guidance applications
where relative positioning is critical. Using GLIDE significantly reduces the variation in position errors to less
than 1 cm from one epoch to the next. Dual-frequency GLIDE improves the absolute accuracy of the GLIDE
position and creates a robust solution resistant to the effects of high ionospheric activity. GLIDE works in all
code positioning modes, including single point, DGNSS and SBAS.
Refer to the NovAtel white paper on
for more information on GLIDE and
Pseudorange/Delta-Phase (PDP) and GLIDE Filters
along with other information available from
novatel.com/support/support-materials/application-notes
3.4.2 PDP and GLIDE Configurations
Pseudorange/Delta-Phase (PDP) and GLIDE position filters can be used for single-frequency single point,
WAAS or DGNSS positioning. Refer to the
PDPFILTER
command and
PDPMODE
command in the
Commands and Logs Reference Manual
.
To reset the PDP or GLIDE filter:
pdpfilter reset
To enable the PDP filter:
pdpfilter enable
Ensure the
PDPFILTER
command is used before the
PDPMODE
command. Set the PDP type and kinematic
type according to the application. For most kinematic applications:
pdpmode relative dynamic
or
pdpmode relative auto
The rest of the setup is position type and log dependent according to the application. See the
PSRDIFFSOURCE
,
INTERFACEMODE
,
SERIALCONFIG
and other configuration commands which are
outlined in the
OEM7 Commands and Logs Reference Manual
. Also refer to the NovAtel application note
APN-038: Pseudorange/Delta-Phase (PDP) and GLIDE Filters
available from our web site at
novatel.com/support/support-materials/application-notes
3.5 STEADYLINE
The STEADYLINE functionality helps mitigate the discontinuities that often occur when the receiver changes
GNSS positioning modes. The effect is especially evident when a receiver transitions from an RTK position
mode solution to a lower accuracy “fall back” solution, such as DGPS, WAAS+GLIDE or even autonomous
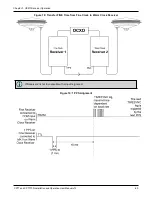
GLIDE (see
Figure 14: Positioning Change Without STEADYLINE
on the next page). Smooth transitions are
particularly important for agricultural steering applications where sudden jumps are problematic.