





























Chapter 4 SPAN Operation
CPT7 and CPT7700 Installation and Operation User Manual v12
92
high as several degrees. For applications where vehicle roll must be well known, or pass-to-pass accuracy of
a highly offset position is especially important, the Multi-Line IMU Body to Vehicle frame offset calibration
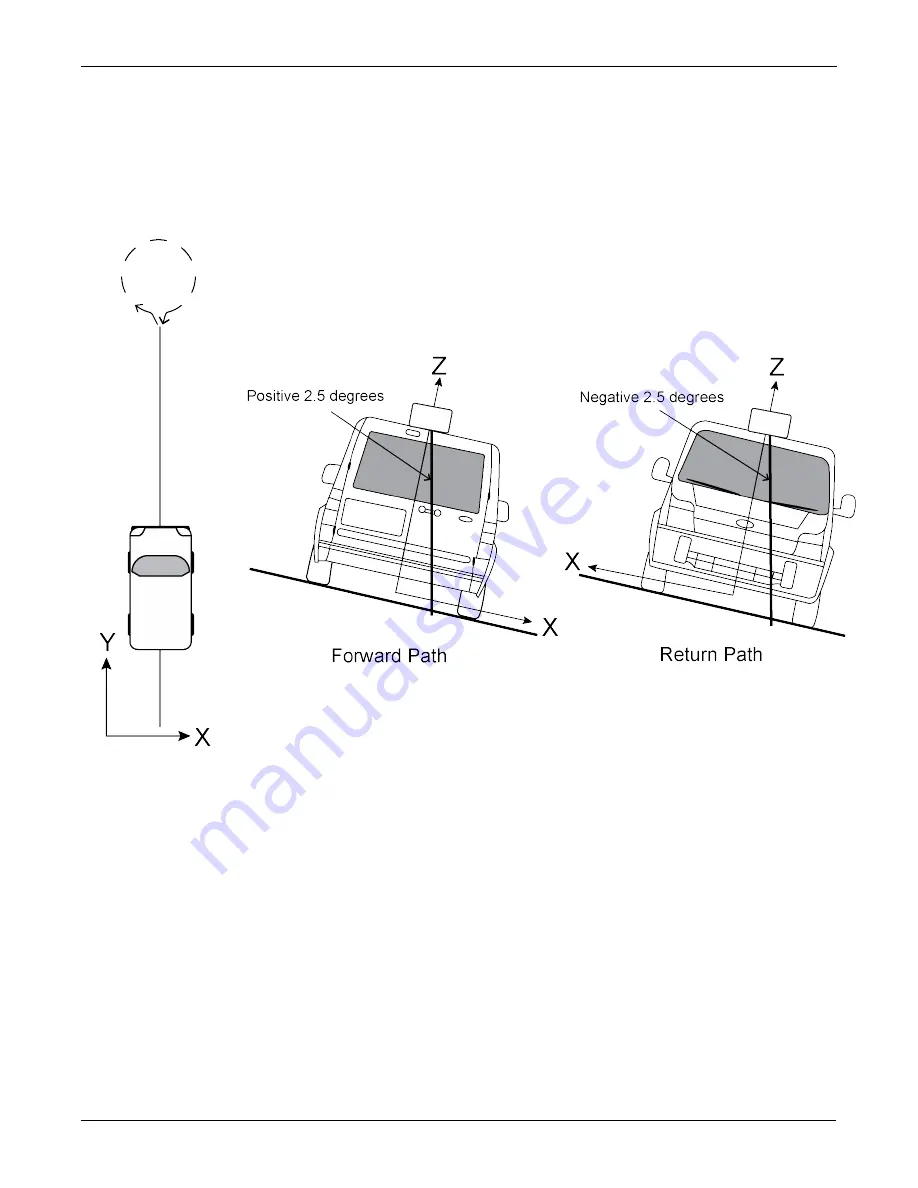
routine offers higher calibrated accuracy in roll. This is done by running independent calibrations over the
same ground path in opposite directions; averaging the results cancels out the effect of any terrain induced
roll. A minimum of two iterations are required. Additional iteration pairs can be executed for increased
reliability.
Figure 28: Multi-Line IMU Body to Vehicle Calibration
The steps for the calibration routine are:
1. Apply power to the CPT7.
2. Configure the SPAN system, see
3. Ensure that an accurate lever arm has been entered into the system.
4. Perform an initial system alignment using one of the methods described in
on page 84. Ensure the system reaches Solution Good.
5. Enable a new calibration using the
INSCALIBRATE
command, with the optional standard deviation target
omitted:
INSCALIBRATE RBV NEW
6. Start to move the vehicle. Drive a straight course, at a vehicle speed greater than 5 m/s (18 km/hr). A
distance of approximately 250 meters is recommended.
To monitor the calibration, log
INSCALSTATUS
using the ONCHANGED trigger.