





























Chapter 4 SPAN Operation
CPT7 and CPT7700 Installation and Operation User Manual v12
106
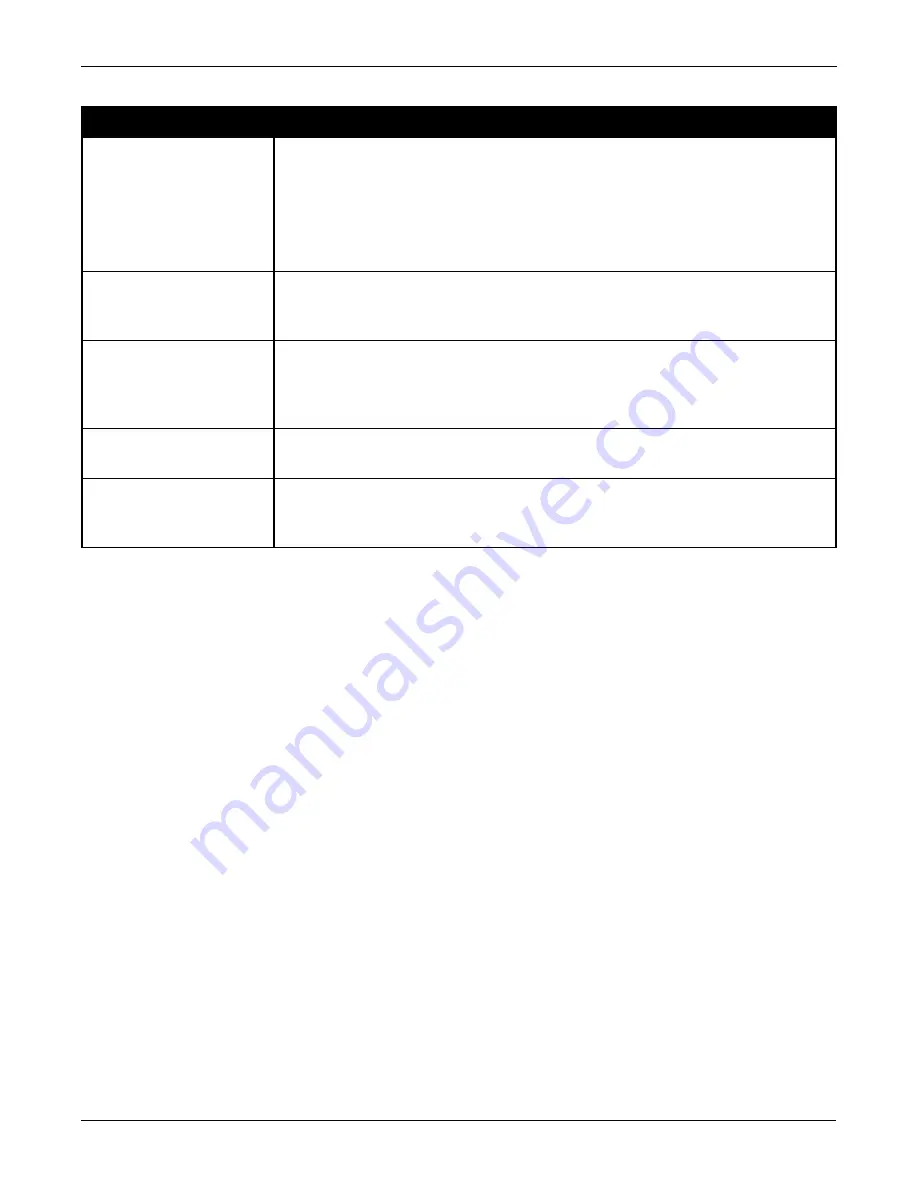
Command
Purpose
SETINSROTATION RBV
This command provides the orientation of the IMU Body frame while the gimbal
frame is in the locked null position. This is required information before the SPAN
system can complete an inertial alignment. The
SETINSROTATION RBV
command relates the IMU Body frame (b) to the Vehicle frame (v).
Once an RBV rotation has been provided, default attitude output will be referenced
to the Vehicle frame.
SETINSROTATION RBM
This command relates the IMU Body frame (b) to the Mount Body frame (m). This
information is required for interpreting the rotation angles from the
VARIABLELEVERARM
log correctly.
SETINSROTATION
USER
By default, attitude information output by SPAN is for the vehicle frame. If attitude
output is required to be referenced to another frame (typically the axes of a gimbal-
mounted sensor), the USER offset can be used to rotate the attitude output in
general SPAN logs to this frame.
SETINSROTATION
MARKx
Similar to the user rotation, this rotation can be used to change the attitude output
reference frame for the MARKxPVA logs.
SETINSTRANSLATION
GIMBAL
This command provides the offset from the IMU center of navigation to the gimbal
center of navigation. This is an optional translation used by Inertial Explorer for
post-processing.
Table 19: Commands used with Variable Lever Arm
4.11 Relative INS
NovAtel's Relative INS technology generates a position, velocity and full attitude vector between two SPAN
systems. One is the Master receiver and the other is the Rover receiver. Once configured, the Master receiver
begins transmitting corrections to the Rover receiver. Relative information is created and the system begins
filling the
RELINSPVA
log and
SYNCRELINSPVA
log on the Rover receiver. The
RELINSPVA
log is then
transmitted back to the Master receiver for output.
The data link required must be able to support [108bits x #obs tracked per second]. The
RELINSPVA
log is requested ONNEW (available from 1Hz-20Hz depending on the setup of the
RELINSAUTOMATION
command) while the
SYNCRELINSPVA
log can be requested ONTIME at up to 200Hz (at the rover only).
Position and velocity solutions are differenced in the ECEF frame and then rotated into the local level. The
Relative offset vector that is output is dependent on Master/Rover's precise RTK vector and their eccentric
offset vectors (optional offset provided using the
USER
parameter in the
SETINSTRANSLATION
command),
shown in







































































