





























Chapter 3 OEM7 Receiver Operation
CPT7 and CPT7700 Installation and Operation User Manual v12
56
RTK ASSIST typically provides 4 cm accuracy. However, if the RTK outage occurs during the first 30
minutes of receiver operation, the position accuracy provided by RTK ASSIST may be lower.
Additional information about enabling and using RTK ASSIST is available in
(available from our website:
novatel.com/support/support-materials/application-
).
3.9 Transferring Time Between Receivers
The
ADJUST1PPS
command is used as part of the procedure to transfer time between receivers. The
number of Pulses Per Second (PPS) is always set to 1 with this command. It is typically used when the
receiver is not adjusting its own clock and is using an external reference frequency.
The
TIMESYNC
log is also used to synchronize time between receivers. It contains a time status field that may
show COARSE or FINE, among others. For a complete list of the time status values and definitions, refer to
GPS Reference Time Status in the
OEM7 Commands and Logs Reference Manual
.
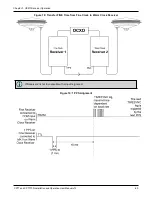
on the next page provides details on the time transfer procedure. Terms used in
the procedure are defined in
below. Refer also to the
ADJUST1PPS
command and the
TIMESYNC
log in the
OEM7 Commands and Logs Reference Manual
.
3.9.1 GPS to Receiver Time Synchronization
Receiver time synchronization with GPS time does not occur until the receiver locks onto the first satellite. The
GPS L1 signal has two main streams of data modulated on the carrier. These data streams are the C/A code
(1.023 MHz rate) and the P(Y) code (10.23 MHz rate). Additionally, a navigation message (at a 50 Hz rate)
contains GPS satellite data including the ephemeris, clock corrections and constellation status. This
navigation message is encoded on both the C/A and P(Y) codes. The navigation message is transmitted via
individual subframes and each subframe is 300 bits in length. With the 50 Hz data bit rate there is a new
subframe transmitted every six seconds.
3.9.2 Time Definitions
The following are related definitions:
Coarse Time
Each subframe contains the transmit time of the next subframe in seconds of GPS Time of Week (TOW). After
the first subframe is collected and decoded by the receiver, an approximate calculation of the receiver clock
offset can be made. The receiver clock offset is the difference between GPS time and internal receiver time.
The calculation is based on subframe transmit time and the approximate propagation time from the satellite
signal to the receiver. The position of the satellite and receiver clock offset are used to re-initialize the seconds
counter on the receiver, resulting in receiver/GPS time synchronization. The accuracy of the receiver time is
expected to be within 30 milliseconds (ms) of GPS time. This initial synchronization is referred to as coarse
time and is indicated by COARSE in the time status field of the
TIMESYNC
log.
Fine Time
When at least four satellites are acquired to calculate the antenna position, a more accurate estimate of the
receiver clock offset is calculated. The new receiver clock offset is used to synchronize the receiver clock even
closer to GPS time. This is referred to as fine time and appears as FINE or FINESTEERING in the time status
field of the
TIMESYNC
log. Fine time accuracy is a function of the GPS constellation status and is influenced
by external receiver RF delay. For the Standard Position Service (SPS) the time accuracy is specified as 20 ns
(1 sigma) with internal compensation.







































































