


























6. SERVO MOTOR DRIVING
6 - 3
(1) Controlword (6040h)
Index Sub Index
Access
Name
Data Type
Default
6040h
0
rw
Controlword
U16
The current control command status can be checked.
In addition, control commands can be written.
The following table lists the bits of this object/register that relate to the home position return operation.
Bit
Description
0 to 3
Refer to section 5.1.2.
4
Homing Operation Start
0: Do not start homing procedure
1: Start or continue homing procedure
5 to 6
Reserved (Note)
7
Refer to section 5.1.2.
8
Halt
0: Bit 4 enable
1: Stop axis according to halt option code (605Dh)
9
Reserved (Note)
10 to 14 Refer to section 5.1.2.
15
Reserved (Note)
Note. The value at reading is undefined. Set "0" when writing.
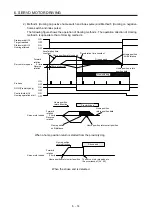
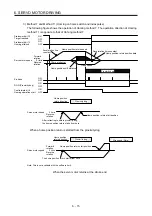
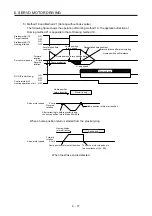
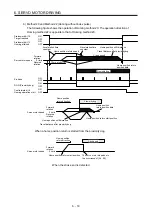
To start a home position return operation, turn bit 4 from "0" to "1". When the home position return
operation is completed or an alarm is issued during the operation, turn bit 4 from "1" to "0".
When bit 8 (Halt) of the Controlword (6040h) is set to "1", the servo motor decelerates to a stop. After
that, when bit 8 (Halt) is set to "0" and bit 4 is turned to "0" and then "1", the home position return
operation is performed again.
(2) Homing method (6098h)
Index Sub Index
Access
Name
Data Type
Default
6098h
0
rw
Homing method
I8
37
The current home position return method can be read.
In addition, a home position return method can be set. To enable the written home position return
method after turning the power back on, execute Store Parameters (1010h). After the execution of Store
Parameters, the setting value of [Pr. PT45] is changed.
Summary of Contents for MELSERVO-JE
Page 15: ...1 FUNCTIONS AND CONFIGURATION 1 4 MEMO ...
Page 21: ...2 SIGNALS AND WIRING 2 6 MEMO ...
Page 57: ...4 PARAMETERS 4 34 MEMO ...
Page 109: ...6 SERVO MOTOR DRIVING 6 44 MEMO ...
Page 111: ...7 APPLICATION OF FUNCTIONS 7 2 MEMO ...
Page 113: ...MEMO ...







































































