























6. SERVO MOTOR DRIVING
6 - 35
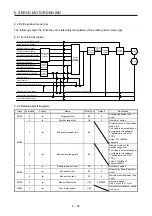
6.2.3 Directions for use
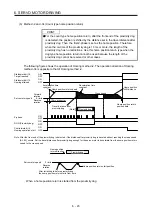
(1) Single Set-point
Update of positioning parameters during a positioning operation is immediately accepted. (The current
positioning operation is cancelled and the next positioning is started.)
Target
position
(set-point)
Profile velocity
Actual
speed
t
Current target
position
processed
New
set-point
(bit 4)
t
t
t
t
Set-point
acknowledge
(bit 12)
Target
reached
(bit 10)
t
t
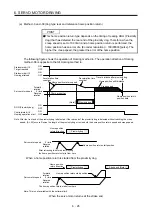
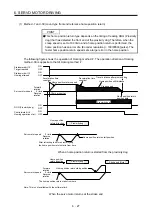
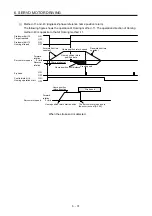
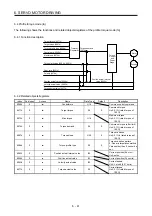
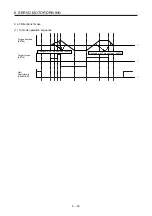
(2) Set of set-points
After the current positioning operation is completed, the next positioning is started. Whether positioning
is stopped at the first positioning point when at an update of the positioning parameter before completion
of the positioning can be switched. To switch the setting, use Change on set-point (Bit 9 of Controlword).
t
t
t
t
t
t
t
Target position
(set-point)
Profile velocity
Actual
speed
Current
target
position
processed
New
set-point
(bit 4)
Set-point
acknowledge
(bit 12)
Target
reached
(bit 10)
Summary of Contents for MELSERVO-JE
Page 15: ...1 FUNCTIONS AND CONFIGURATION 1 4 MEMO ...
Page 21: ...2 SIGNALS AND WIRING 2 6 MEMO ...
Page 57: ...4 PARAMETERS 4 34 MEMO ...
Page 109: ...6 SERVO MOTOR DRIVING 6 44 MEMO ...
Page 111: ...7 APPLICATION OF FUNCTIONS 7 2 MEMO ...
Page 113: ...MEMO ...







































































