























6. SERVO MOTOR DRIVING
6 - 10
(2) CiA 402-type homing method
(a) Home position return type in CiA 402 type
The following shows the CiA 402-type home position return.
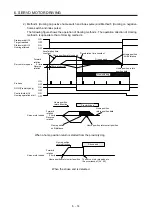
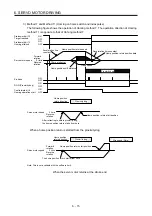
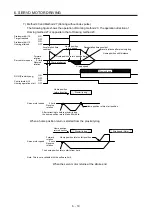
1) Method 3 and 4: Homing on positive home switch and index pulse
These home position return types use the front end of the proximity dog as reference and set the
Z-phase right before and right after the dog as a home position.
Method 3 has the operation of the dog type last Z-phase reference home position return, and
Method 4 has the operation of the dog cradle type home position return at a forward rotation start.
However, if the stroke end is detected during home position return, [AL. 90] occurs.
3
3
4
4
Index Pulse
Home Switch
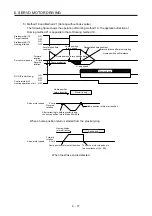
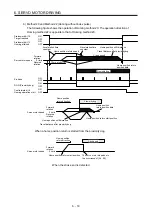
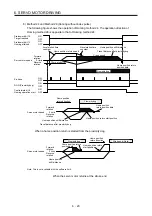
2) Method 5 and 6: Homing on negative home switch and index pulse
These home position return types use the front end of the proximity dog as reference and set the
Z-phase right before and right after the dog as a home position. Method 5 and 6 differ from
Method 3 and Method 4 in the starting direction: the starting direction of Method 5 and 6 is the
reversed direction.
Summary of Contents for MELSERVO-JE
Page 15: ...1 FUNCTIONS AND CONFIGURATION 1 4 MEMO ...
Page 21: ...2 SIGNALS AND WIRING 2 6 MEMO ...
Page 57: ...4 PARAMETERS 4 34 MEMO ...
Page 109: ...6 SERVO MOTOR DRIVING 6 44 MEMO ...
Page 111: ...7 APPLICATION OF FUNCTIONS 7 2 MEMO ...
Page 113: ...MEMO ...







































































