





















6. SERVO MOTOR DRIVING
6 - 12
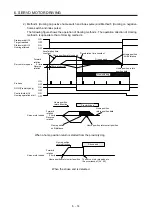
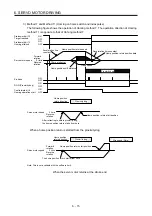
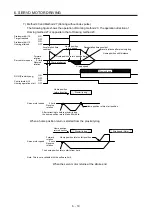
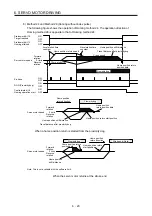
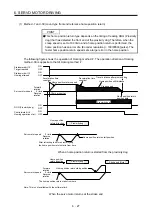
5) Method 33 and 34: Homing on index pulse
These home position return types set the Z-phase detected first as a home position. The
operation is the same as that of the dogless Z-phase reference home position return except that
the creep speed is applied at the start.
Index Pulse
33
34
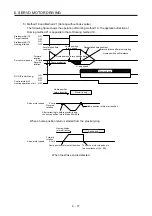
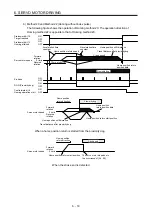
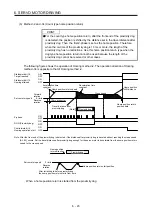
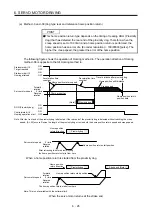
6) Method 35 and 37: Homing on current position
These home position return types set the current position as a home position. The operation is
the same as that of the data set type home position return; however, these types can be
executed even during servo-off.
ON
OFF
ON
OFF
ON
OFF
Servo motor speed
Statusword bit 10
Target reached
Statusword bit 12
Homing attained
Controlword bit 4
Homing operation start
Home position
return position data
Reverse
rotation
0 r/min
Forward
rotation
Summary of Contents for MELSERVO-JE
Page 15: ...1 FUNCTIONS AND CONFIGURATION 1 4 MEMO ...
Page 21: ...2 SIGNALS AND WIRING 2 6 MEMO ...
Page 57: ...4 PARAMETERS 4 34 MEMO ...
Page 109: ...6 SERVO MOTOR DRIVING 6 44 MEMO ...
Page 111: ...7 APPLICATION OF FUNCTIONS 7 2 MEMO ...
Page 113: ...MEMO ...







































































