





























4. PARAMETERS
4 - 18
No./symbol/
name
Setting
digit
Function
Initial
value
[unit]
PC29
*COP8
Function
selection C-8
_ _ _ x For manufacturer setting
0h
_ _ x _
2h
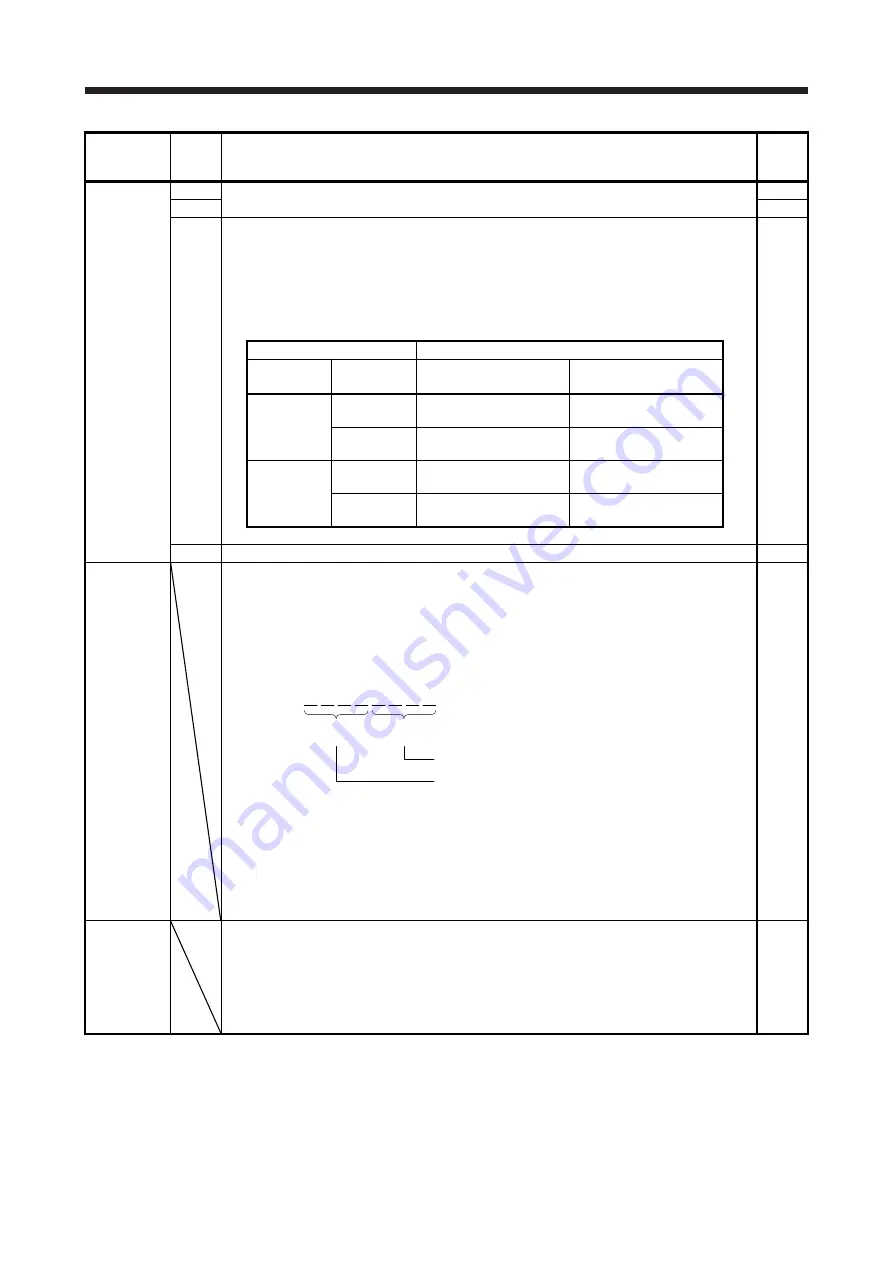
_ x _ _ POL reflection selection at torque mode
The polarity of "Target torque (Index: 6071h)", "Torque demand (Index: 6074h)", "Positive torque
limit value (Index: 60E0h)", "Negative torque limit value (Index: 60E1h)", and "Torque actual value
(Index: 6077h)" changes depending on the combination of this parameter and [Pr. PA14 Rotation
direction selection].
0: Enabled
1: Disabled
1h
Setting value
Servo motor rotation direction/travel direction
[Pr. PA14]
[Pr. PC29]
Torque mode
Torque command: Forward
Torque mode
Torque command: Reverse
0
0 _ _ _:
Enabled
CCW or positive direction CW or negative direction
1 _ _ _:
Disabled
CCW or positive direction CW or negative direction
1
0 _ _ _:
Enabled
CW or negative direction CCW or positive direction
1 _ _ _:
Disabled
CCW or positive direction CW or negative direction
x _ _ _ For manufacturer setting
0h
PC75
FEWL
Following
error output
level
(Lower four
digits)
Set a following error output level.
Upper and lower are a set.
This function will be enabled in the profile position mode.
When the state in which the value of droop pulses exceeds the setting value for [Pr. PC75, Pr.
PC76] continues for the time set in [Pr. PC77] or longer, "Statusword (Index: 6041h) bit 13
Following error" will be turned on. However, setting "FFFFFFFFh" will disable it.
Set a value in hexadecimal.
Setting value:
Upper four
digits
Lower four
digits
[Pr. PC75]
[Pr. PC76]
The unit can be changed to 10
-3
[degree] or [pulse] with the setting of [Pr. PT01].
This parameter corresponds to "Following error window (Index: 6065h)". When this parameter is
mapped to the link device of CC-Link IE Field Network Basic, the value written with MR
Configurator2 is overwritten by the controller. Thus, do not write a value with MR Configurator2.
Setting range: 00000000h to FFFFFFFFh
0000h
Refer to
Function
column
for unit.
PC76
FEWH
Following
error output
level
(Upper four
digits)
Set a following error output level.
Upper and lower are a set.
This function will be enabled in the profile position mode.
Refer to [Pr. PC75] for details.
The unit can be changed to 10
-3
[degree] or [pulse] with the setting of [Pr. PT01].
0000h
Refer to
Function
column
for unit.
Summary of Contents for MELSERVO-JE
Page 15: ...1 FUNCTIONS AND CONFIGURATION 1 4 MEMO ...
Page 21: ...2 SIGNALS AND WIRING 2 6 MEMO ...
Page 57: ...4 PARAMETERS 4 34 MEMO ...
Page 109: ...6 SERVO MOTOR DRIVING 6 44 MEMO ...
Page 111: ...7 APPLICATION OF FUNCTIONS 7 2 MEMO ...
Page 113: ...MEMO ...







































































