
























6. SERVO MOTOR DRIVING
6 - 5
Setting value
Home position return method
Direction of
rotation
Description
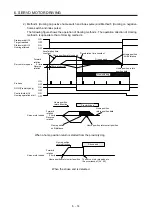
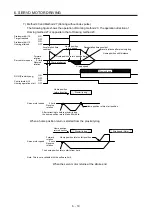
28
Homing without index pulse Reverse rotation
Although this type is the same as the dog cradle type home
position return, the stop position is not on the Z-phase. Starting
from the front end of the dog, the position is shifted by the travel
distance after proximity dog and the home position shift
distance. The position after the shifts is set as the home
position.
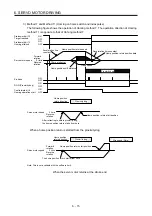
33
Homing on index pulse
Reverse rotation
Although this type is the same as the dogless Z-phase
reference home position return, the creep speed is applied as
the movement start speed.
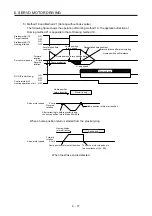
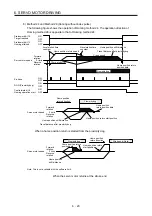
34
Homing on index pulse
Forward rotation
Although this type is the same as the dogless Z-phase
reference home position return, the creep speed is applied as
the movement start speed.
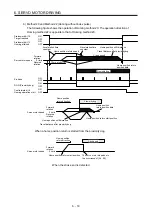
35
Homing on current position
The current position is set as the home position. This type can
be executed not in the Operational enabled state.
37
Homing on current position
The current position is set as the home position. This type can
be executed not in the Operational enabled state.
Summary of Contents for MELSERVO-JE
Page 15: ...1 FUNCTIONS AND CONFIGURATION 1 4 MEMO ...
Page 21: ...2 SIGNALS AND WIRING 2 6 MEMO ...
Page 57: ...4 PARAMETERS 4 34 MEMO ...
Page 109: ...6 SERVO MOTOR DRIVING 6 44 MEMO ...
Page 111: ...7 APPLICATION OF FUNCTIONS 7 2 MEMO ...
Page 113: ...MEMO ...







































































