






















6. SERVO MOTOR DRIVING
6 - 38
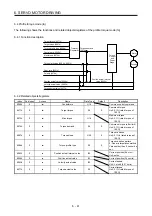
(1) Details on the Controlword (6040h) (pv mode)
Bit
Symbol
Description
4
(reserved)
The value at reading is undefined. Set "0" when writing.
5
(reserved)
6
(reserved)
8
HALT
0: The servo motor is driven.
1: The servo motor is stopped according to Halt option code (605Dh).
9
(reserved)
The value at reading is undefined. Set "0" when writing.
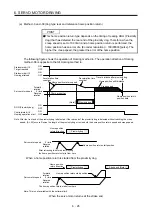
15
New set-point
0: The servo motor is stopped.
1: The servo motor is driven.
Enabled only in the profile velocity mode.
When "_ _ _ 0" (enabled) is set in [Pr. PC23 (_ _ _ x) Servo-lock selection at speed control stop],
the servo motor is driven by setting bit 15 to "1". When bit 15 is set to "0" while the servo motor is
stopped, the servo motor goes into the servo-lock status. When bit 15 is set to "0" while the servo
motor is being driven, the servo motor decelerates to a stop and goes into the servo-lock status.
When "_ _ _ 1" (disabled) is set in [Pr. PC23 (_ _ _ x)], the servo motor is driven by setting Target
velocity regardless of the setting of bit 15.
(2) Details on the Statusword (6041h) (pv mode)
Bit
Symbol
Description
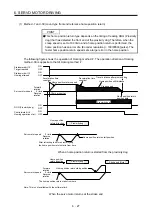
10
Target reached
0 (Halt (Bit 8) = 0): Target velocity not reached.
0 (Halt (Bit 8) = 1): Axis decelerates
1 (Halt (Bit 8) = 0): Target velocity reached.
1 (Halt (Bit 8) = 1): Velocity of axis is 0
Judgment condition for Target velocity reached
If the error between Velocity actual value (606Ch) and Target velocity (60FFh) has stayed within
Velocity window (606Dh) for Velocity window time (606Eh) or more, Target velocity reached is
stored.
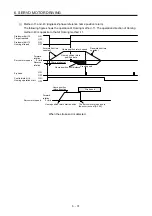
12
Speed
0: Speed is not equal 0
1: Speed is equal 0
Judgment condition for Speed is not equal 0
If the absolute value of Velocity actual value (606Ch) has exceeded Velocity threshold (606Fh)
for Velocity threshold time (6070h) or more, Speed is not equal 0 is stored.
13
Max slippage error
0: Maximum slippage not reached
1: Maximum slippage reached (not compatible) (Note)
Max slippage is a maximum slippage of the asynchronous servo motor.
Note. This is not compatible with the MR-JE-_C servo amplifier.
Summary of Contents for MELSERVO-JE
Page 15: ...1 FUNCTIONS AND CONFIGURATION 1 4 MEMO ...
Page 21: ...2 SIGNALS AND WIRING 2 6 MEMO ...
Page 57: ...4 PARAMETERS 4 34 MEMO ...
Page 109: ...6 SERVO MOTOR DRIVING 6 44 MEMO ...
Page 111: ...7 APPLICATION OF FUNCTIONS 7 2 MEMO ...
Page 113: ...MEMO ...







































































