





























6. Interpolation Functions
6.1 Positioning (Rapid Traverse)
38
Programmable in-position width command for positioning
This command commands the in-position width for the positioning command from the machining
program.
G00 X__ Y__ Z__ , I__ ;
In-position width
Positioning coordinate value of each axis
Operation during in-position check
Execution of the next block starts after confirming that the position error amount of the positioning
(rapid traverse: G00) command block and the block that carries out deceleration check with the
linear interpolation (G01) command is less than the in-position width issued in this command.
The in-position width in this command is valid only in the command block, so the deceleration
check method set in base specification parameter "#1193 inpos" is used for blocks that do not have
the in-position width command.
When there are several movement axes, the system confirms that the position error amount of
each movement axis in each part system is less than the in-position width issued in this command
before executing the next block.
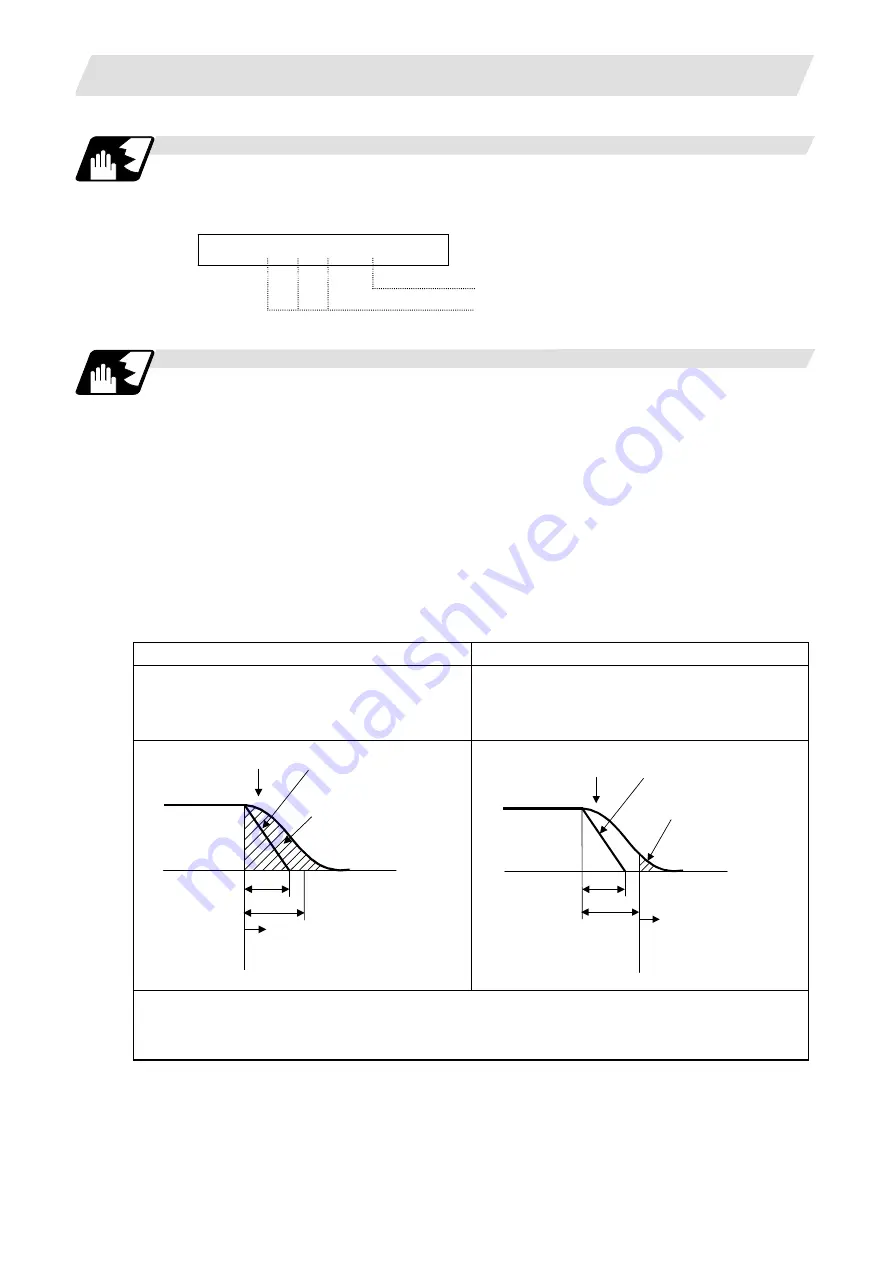
The differences of when the in-position check is validated with the parameter (base specification
parameter "#1193 inpos" set to 1; refer to next page for in-position width) and when validated with
this command are shown in the following drawing.
Differences between in-position check with this command and in-position check with parameter
In-position check with ",I" address command
In-position check with parameter
After starting deceleration of the command
system, the position error amount and
commanded in-position width are compared.
After starting deceleration of the command
system, the servo system's position error amount
and the parameter setting value (in-position
width) are compared.
Servo
Command
In-position width
(Error amount of command
end point and machine
position)
Start of in-position
check with ",I" address command
Block being
executed
Ts
Td
In-position width
(Servo system position
error amount)
Start of in-position
check with parameter
Servo
Command
Block being
executed
Ts
Td
Ts : Acceleration/deceleration time constant
Td : Deceleration check time
Td = Ts + (0 to 14ms)







































































