12. Tool Compensation Functions
12.4 Tool Radius Compensation
192
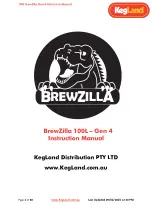
When I, J, K are commanded in G40
(1) If the final movement command block in the four blocks before the G40 block is the G41 or
G42 mode, it will be assumed that the movement is commanded in the vector I, J or K direction
from the end point of the final movement command. After interpolating between the
hypothetical tool center path and point of intersection, it will be canceled. The compensation
direction will not change.
Tool center path
Program path
Hypothetical tool center path
N1 (G41) G1X_ ;
N2 G40XaYbIiJj;
r
N1
(i,j)
N2
A
(a,b)
r
G41
In this case, the point of intersection will always be obtained, regardless of the compensation
direction, even when the commanded vector is incorrect as shown below.
Tool center path
Program path
Hypothetical tool center path
r
N1
(i,j)
N2
A
(a,b)
r
G41
When the I and j symbols
in the above program
example are incorrect
If the compensation vector obtained with point of intersection calculation is extremely large, a
perpendicular vector will be created in the block before G40.
Tool center path
Program path
Hypothetical tool center path
r
G40
(i,j)
A
(a,b)
r
G41