





























Torque control under Real sensorless vector control and vector control
203
5
5.4.8
Torque control by variable-current limiter
control
• By adding the bias amount to the line speed (master speed) as the speed command value to saturate the speed controller
and changing the torque limit value, torque control can be performed.
• For a positive bias amount (the speed command value faster than the line speed), power driving is applied, and for a
negative bias amount (the speed command value slower than the line speed), regenerative driving is applied.
• Speed control is the basic control. For how to set the speed command and torque limit value, refer to the description of
speed control (
• Under speed control with
Pr.800
= "0 or 100", when the speed command value is changed by an external force, the torque
limit is invalid during a change in the speed command value to adjust the internal speed command value to the actual
speed.
Under variable speed limiter control with
Pr.800
= "6 or 106", the process to adjust the speed command value to the actual
speed is not performed, and thus the torque limit remains valid. This prevents torque from suddenly changing at a speed
change.
NOTE
• When
Pr.800
= "6 or 106" (torque control by a variable-current limiter),
Pr.690 Deceleration check time
and
Pr.873 Speed
limit
are ignored.
???????
Parameters referred to
Pr.690 Deceleration check time
Pr.873 Speed limit
Pr.800 Control method selection, Pr.451 Second motor control method selection
By changing the torque limit value for speed control, torque control can be performed.
Pr.
Name
Initial value
Setting range
Description
800
G200
Control method selection
20
6
Vector control
Variable-current limiter
torque control
106
Vector control
(fast-response operation)
0 to 5, 100 to 105
Vector control
9, 109
Vector control test operation
10 to 12, 100 to 112
Real sensorless vector control
13, 14, 113, 114
For manufacturer setting. Do not set.
20
V/F control (Advanced magnetic flux vector control,
PM sensorless vector control)
451
G300
Second motor control
method selection
9999
0 to 6, 10 to 14, 20,
100 to 106,
110 to 114
Select the control method for the second motor.
The second motor is enabled when the RT signal is ON.
The setting range is the same as that of
Pr.800
.
9999
The
Pr.800
setting is used.
Vector
Vector
Vector
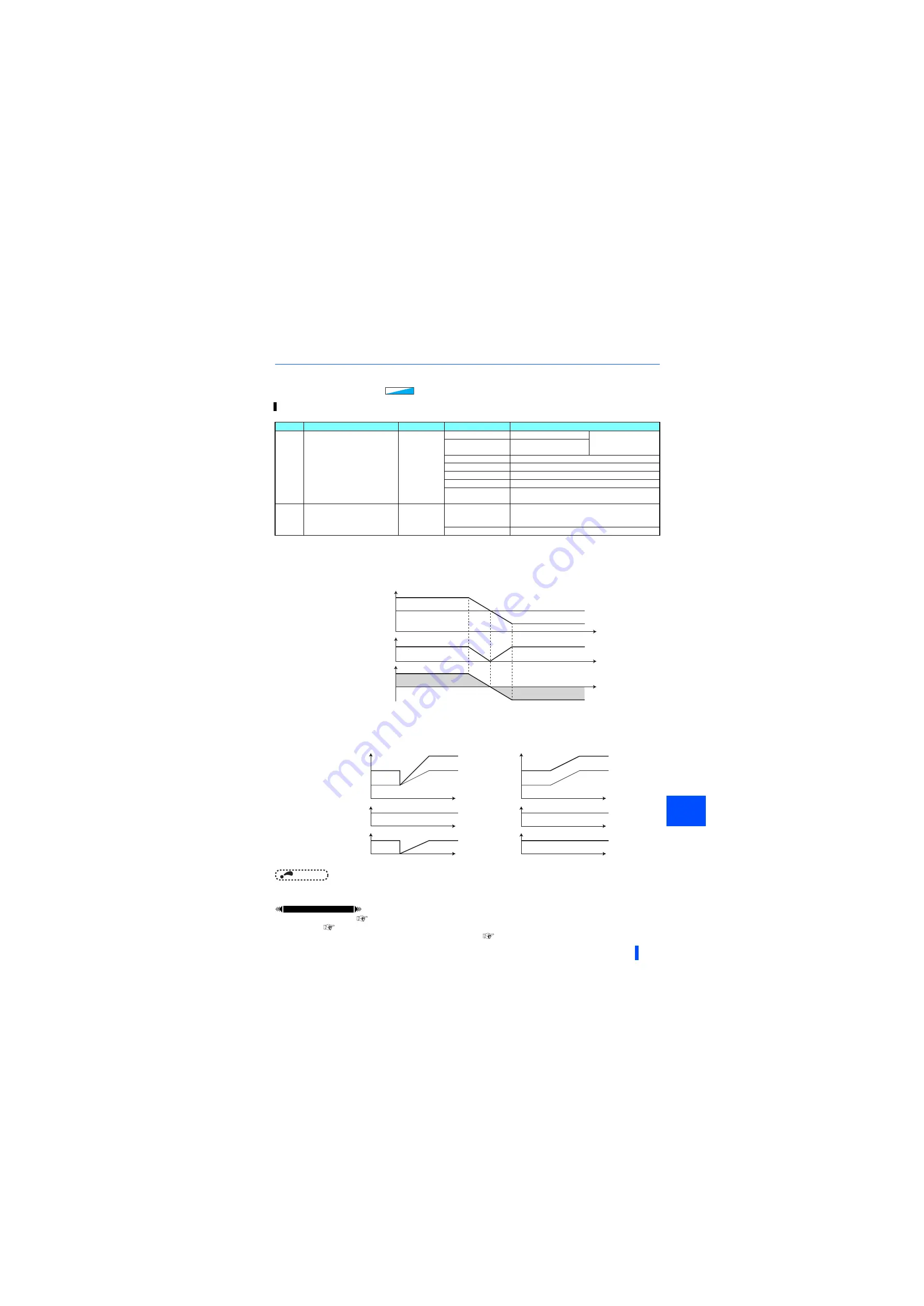
Line speed
Speed command value
Torque limit value
(absolute value)
Generated torque
Power driving
Regenerative driving
0
0
0
Line speed
Speed command
value
Pr.800
=0, 100
0
0
0
Torque limit value
(absolute value)
Line speed
Speed command
value
Generated torque
0
0
0
Torque limit value
(absolute value)
Pr.800
=6, 106
Summary of Contents for 800 Series
Page 11: ...MEMO 10 ...
Page 17: ...MEMO 16 ...
Page 95: ...MEMO 94 ...
Page 671: ...MEMO 670 ...
Page 681: ...MEMO 680 ...