





























6. Parameter Detail
149
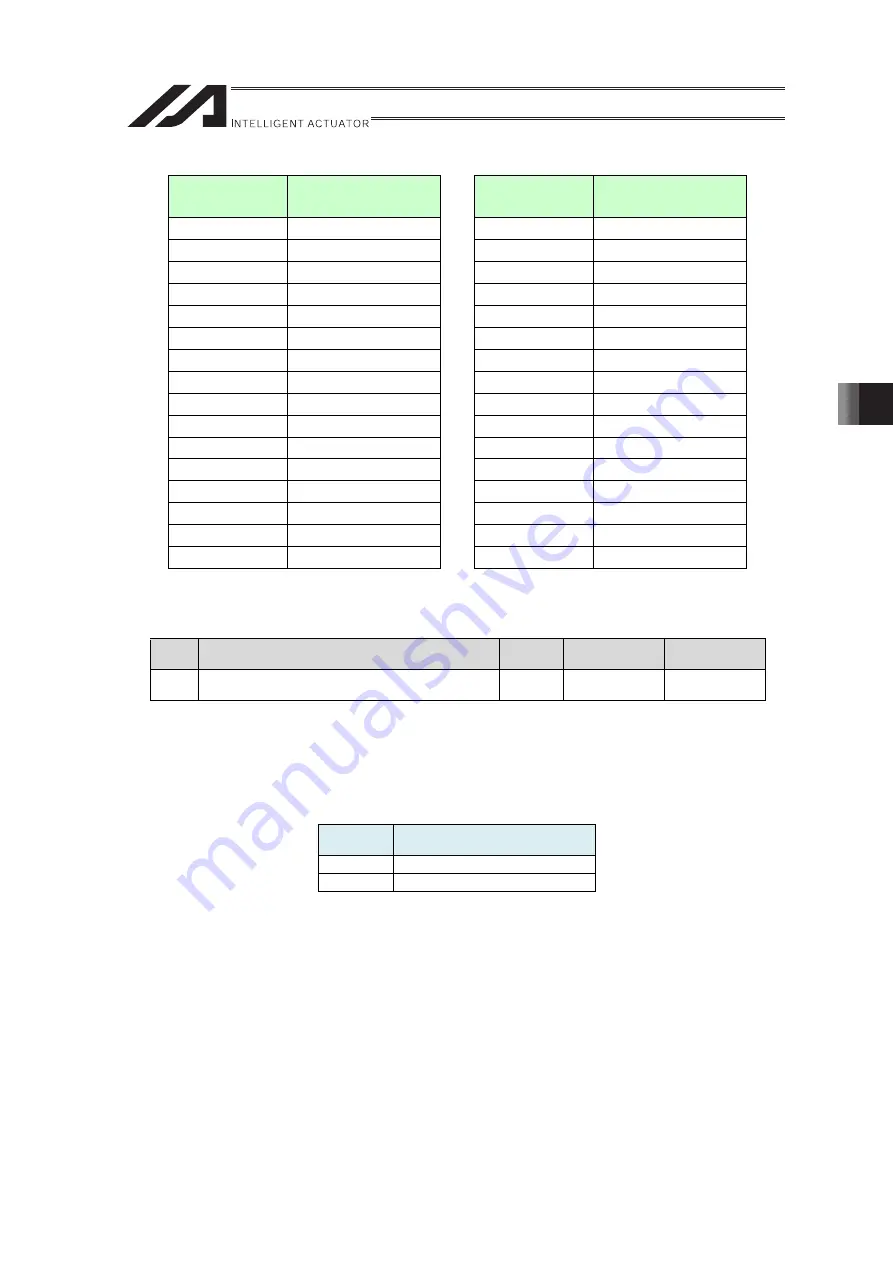
Max. Number of
Extension Motion
Control Axes
Max. Number of Position
Data per Axis
Max. Number of
Extension Motion
Control Axes
Max. Number of Position
Data per Axis
0
512 16
240
1
512 17
227
2
512 18
215
3
512 19
204
4
512 20
195
5
512 21
186
6
512 22
178
7
512 23
170
8
455 24
163
9
409 25
157
10
372 26
151
11
341 27
146
12
315 28
141
13
292 29
136
14
273 30
132
15
256 31
128
[2] Extension Motion Control Synchronizing Command Master Axis Position Type (I/O Parameter
No.533)
No.
Parameter Name
Unit
Input range
Initial value
(reference)
533 Extension Motion Control Synchronizing Command
Master Axis Position Type
-
0 to FFFFFFFF
H
00000000
H
Select the type of the master axis position that the slave axes track when having a
synchronizing operation with a standard motion control axis as the master axis. Set the types
with four bytes each from Axis No. 1 in order from the low-order bit. The type available for
indicate should be either 0 (current command position) or 1 (current position), and all the axes
are set to 0 (current command position) at the delivery.
Setting
value
Contents
0
Current value command
1
Current position
Example :
Setting value
= 00000011
H
→
Synchronize to the “current position” when Axis No. 1
or 2 to is set as the synchronizing master axis
Synchronize to the “current command position” when
Axis No. 3 to 8 to is set as the synchronizing master
axis
When set to 0, the slave axes will make a synchronizing operation to the current command
position of the master axis. In this case, delay can be reduced in tracking of the slave axes to
the master axis position.
When set to 1, a synchronizing operation will be made to the current position (feedback
value) of the master axis position. It enables to have a synchronizing operation with checking
the current position of the master axis, but as the command to the applicable slave axis
position will be output after the master axis reaches the current position, there will be a delay
in the tracking of the slave axis position to the master position.
Select the suitable type considering the control specifications of the constructed equipment.
ME0364-2B
Summary of Contents for RA Series
Page 2: ......
Page 4: ...ME0364 2B ...
Page 22: ...1 Outline of Extension Motion Control Feature 14 ME0364 2B ...
Page 40: ...3 Basic Settings 32 ME0364 2B ...
Page 150: ...5 Practical Settings 142 ME0364 2B ...
Page 170: ...6 Parameter Detail 162 ME0364 2B ...
Page 174: ...7 Details of Features 166 ME0364 2B ...
Page 184: ......
Page 185: ......





















































