




























120
Program description: Telemetry menu
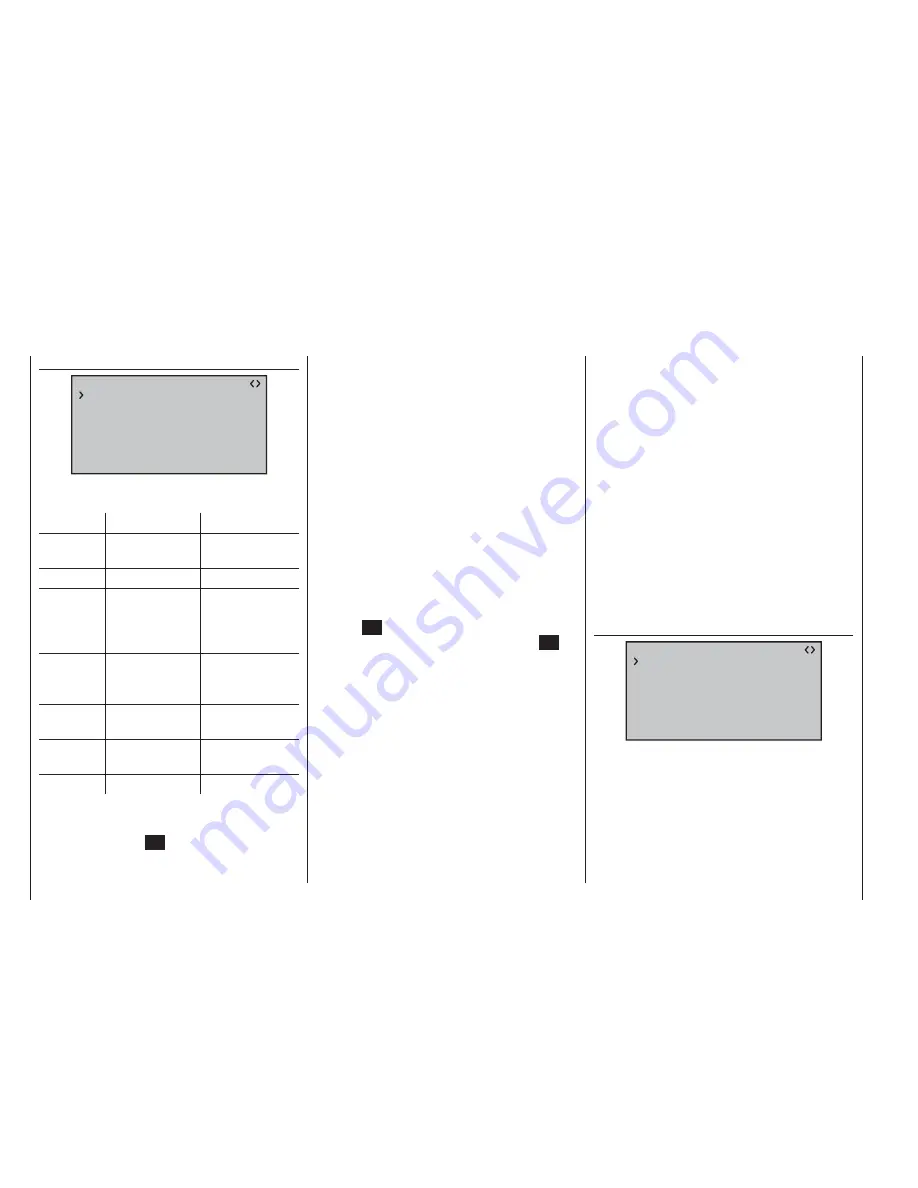
RX SERVO
RX SERVO
REVERSE : OFF
CENTER : 1500
μ
sec
TRIM : –000
μ
sec
TRAVEL– : 150%
OUTPUT CH: 01
: 150%
PERIOD : 20msec
Before you carry out any programming at this screen
display be sure to read the information on page 117.
Value
Explanation
Possible settings
OUTPUT CH Channel select
1 … according to
receiver
REVERSE
Servo reverse
OFF / ON
CENTER
Servo centre in µs If active (high-
lighted), according
to transmitter
control position
TRIM
Trim position in µs
deviating from the
CENTRE position
-120 … +120 µs
TRAVEL–
Travel limitation at
% servo travel
30 … 150%
Travel limitation at
% servo travel
30 … 150%
PERIOD
Cycle time in ms
10 or 20 ms
OUTPUT CH (Channel select)
Select the “Channel” line if necessary using the ar-
row buttons. Touch the
SET
button of the right-hand
touch-key to highlight the value fi eld. Now use the arrow
buttons of the right-hand touch-key to set the desired
channel (e. g. 01).
The following parameters always
refer to the channel which you set at this point:
REVERSE (servo reverse)
Sets the direction of rotation of the servo connected to
the selected control channel: ON / OFF
CENTER (servo centre)
The “CENTRE” line displays the current pulse width in
µs of the control channel selected in the “OUTPUT CH”
line.
The displayed value varies according to the current posi-
tion of the transmitter control which affects this control
channel, and also its trim position.
A pulse width of 1500 µs corresponds to the standard
centre position, and therefore the usual servo centre
setting.
To change this value, select the “CENTRE” line and
touch the
SET
button. Move the corresponding transmit-
ter control to the desired position, and touch the
SET
button again to store the current transmitter control
position. This position is now stored as the new neutral
position.
TRIM (trim position)
The purpose of the “TRIM” line is to provide fi ne adjust-
ment of the neutral position of a servo connected to
the control channel selected in the “OUTPUT CH” line.
Adjustments are made in 1 µs increments using the
arrow buttons of the right-hand touch-key. The value
in the “CENTRE” line can be adjusted over the range
+/- 120 µs around the TRIM value set here.
Default setting: 0 µs
TRAVEL–/+ (servo travel –/+)
This option can be used to place a limit on servo travel
(control surface travel) for the servo connected to the
control channel selected in the “OUTPUT CH” line. The
value is set separately for each side of centre.
The setting can be altered separately for both directions
within the range 30 ... 150%.
Default setting: 150% on both sides.
PERIOD (cycle time)
In this line you can determine the frame time for the
individual channel signals. This setting applies to all
control channels.
If you use digital servos exclusively, it is safe to set a
cycle time of 10 ms.
If you are using a mixture of servo types, or exclusively
analogue servos, it is essential to set 20 ms, otherwise
the servos will be “over-stressed” and may response by
jittering or making rumbling noises.
RX FAIL SAFE
RX FAIL SAFE
INPUT CH: 01
MODE : HOLD
F.S.Pos. : 1500
μ
sec
DELAY : 0.75sec
OUTPUT CH: 01
FAIL SAFE ALL: NO
POSITION : 1500
μ
sec
Before we describe this menu a few words as a re-
minder:
“Doing nothing” is the worst thing you can do in this
regard. The default setting for the HoTT receiver is
“HOLD” mode.
If interference should occur with hold-mode in force, and
if you are very lucky, the model aircraft will fl y straight
ahead for an indefi nite period and then “land” some-
Summary of Contents for mx-16 HOTT
Page 7: ...7 For your notes...
Page 37: ...37 For your notes...
Page 41: ...41 For your notes...
Page 45: ...45 For your notes...
Page 51: ...51 For your notes...
Page 55: ...55 For your notes...
Page 81: ...81 For your notes...
Page 103: ...103 For your notes...
Page 133: ...133 For your notes...
Page 141: ...141 For your notes...
Page 161: ...161 For your notes...
Page 173: ...173 For your notes...







































































