





























SMARC T335x Carrier Board Hardware Design Guide, Document Revision 1.2
2.7.2. CAN Interface Implementation Guidelines
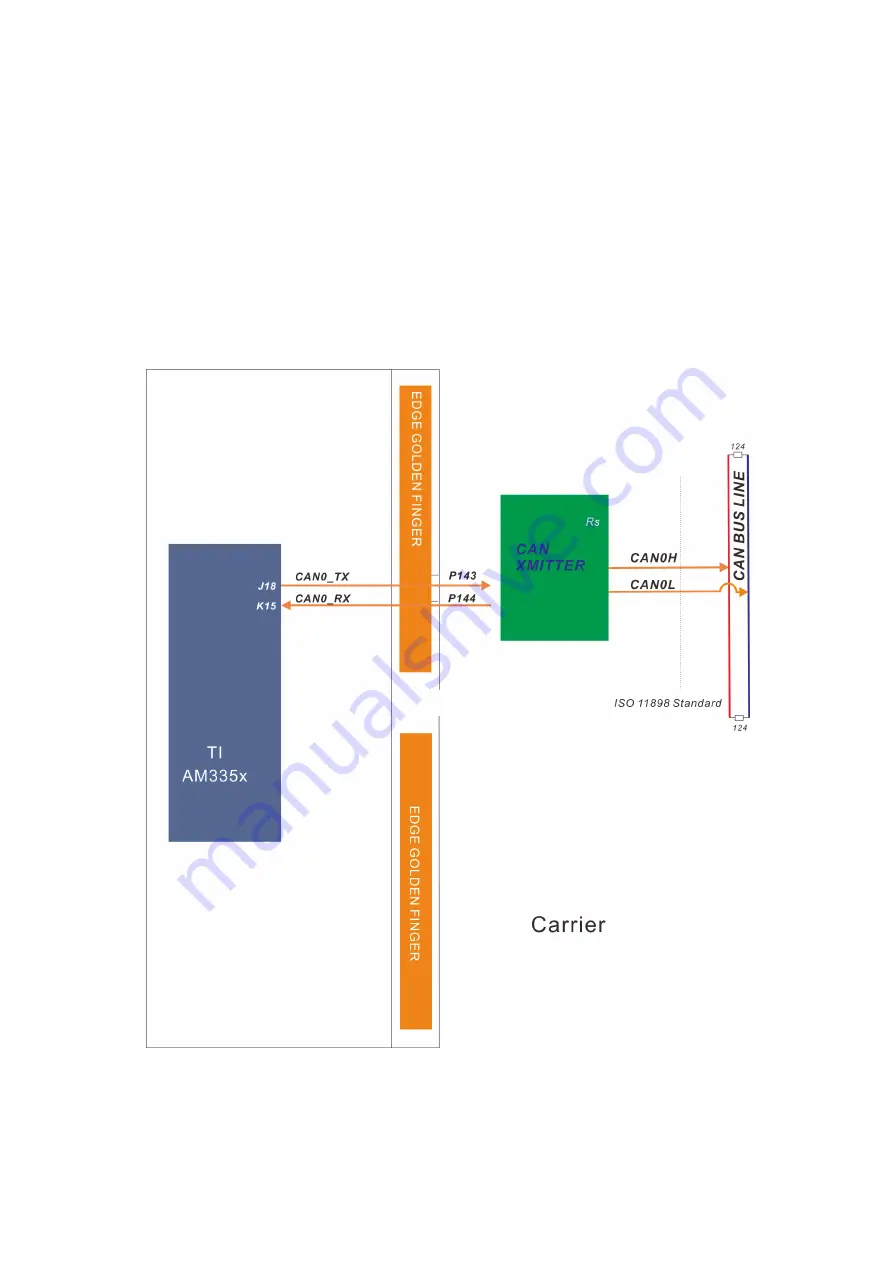
2.7.2.1. CAN System Architecture
A typical architecture of the CAN system is shown in following figure. A
CAN interface controller is connected to the transceiver via a serial data
output line (
TX
) and a serial data input line (
RX
). The transceiver is
attached to the bus line via its two bus terminals
CANH
and
CANL
, which
provide differential receive and transmit capability.
Figure 26: CAN Interface System Block Diagram



































































