





























www.balluff.com
11
5.3.
Signal processing
5.3.1.
Sampling rate
Each axis of the acceleration and gyroscope MEMS is sampled by the internal microcontroller at a rate of
1000 Hz. Those samples are then processed and fed into the sensor fusion algorithm.
5.3.2.
Sensor fusion algorithm
The sensor fusion algorithm transforms the raw MEMS outputs into a reliable inclination value. Based on the
selected function mode, application profile and user-adjustable parameters, the smart algorithm will combine the
accelerometer and gyroscope outputs in a balanced way optimised for your application. The limitations for the
sensor fusion algorithm are: acceleration max 1.5 g, angular rate max. 500°/s. The calculation rate, and therefore
also the output rate, is 100 Hz.
5.3.3.
Digital filters
To eliminate noise or reduce the bandwidth, the inclination values can be further processed with extra digital
filters. In each application profile, those filters can be enabled and configured using the CAN object dictionary.
Output filter
A 1
st
order low-pass filter is implemented for reduction of bandwidth and filtering noise. Each application profile
has its own default filter settings, which can be set via subindex 06
h
of CAN object 3021
h
to 3024
h
. Another way to
control the filter settings for the current active application profile is via object 300E
h.
The value you set with 300E
h
will also be written to the corresponding object for that active application profile (object 3021
h
~ 3024
h
). The filter
settings are effective on all sensing axes, but by default they are disabled.
By setting a time-
constant τ (time in which the output changes to 70% of the step after a step response), the -3 dB
frequency can be calculated by the formula f = 1 / (2
π*τ). A longer filter time results in a narrower bandwidth and
therefore less noise, but also causes a longer phase delay.
This -3 dB frequency is independent of TPDO event time. However, when the output filter time-constant is
set to a value lower than the TPDO event time, the output filter is automatically disabled. For example, if TPDO
event time is set to 100 ms, and output filter time is set to 50 ms, this filter will not work.
Moving average filter
The final inclination output is an average of the last N samples. The sampling rate of this filter is 10 ms. The
various application profiles have different default filter settings. This filter can be controlled via CAN object 3021
h
subindex 07
h
to 3024
h
subindex 07
h
. It can also be controlled for the active application profile via CAN object
300D
h
. In this case the sensor will update the correct object of the active application profile (in the range 3021
h
subindex 07
h
to 3024
h
subindex 07
h
). The moving average filter is disabled in the factory default application
profile 1.
N must be a number from 0
d
-10
d
. Setting the N to 0
d
and 1
d
will disable this filter.
The TPDO event timer decides the cycle time of the TPDO message. By default, the sensor sends a new TPDO
every 100 ms. This TPDO message contains an inclination measurement which is an average of the preceding N
x 10ms samples and is totally independent of the TPDO event time.
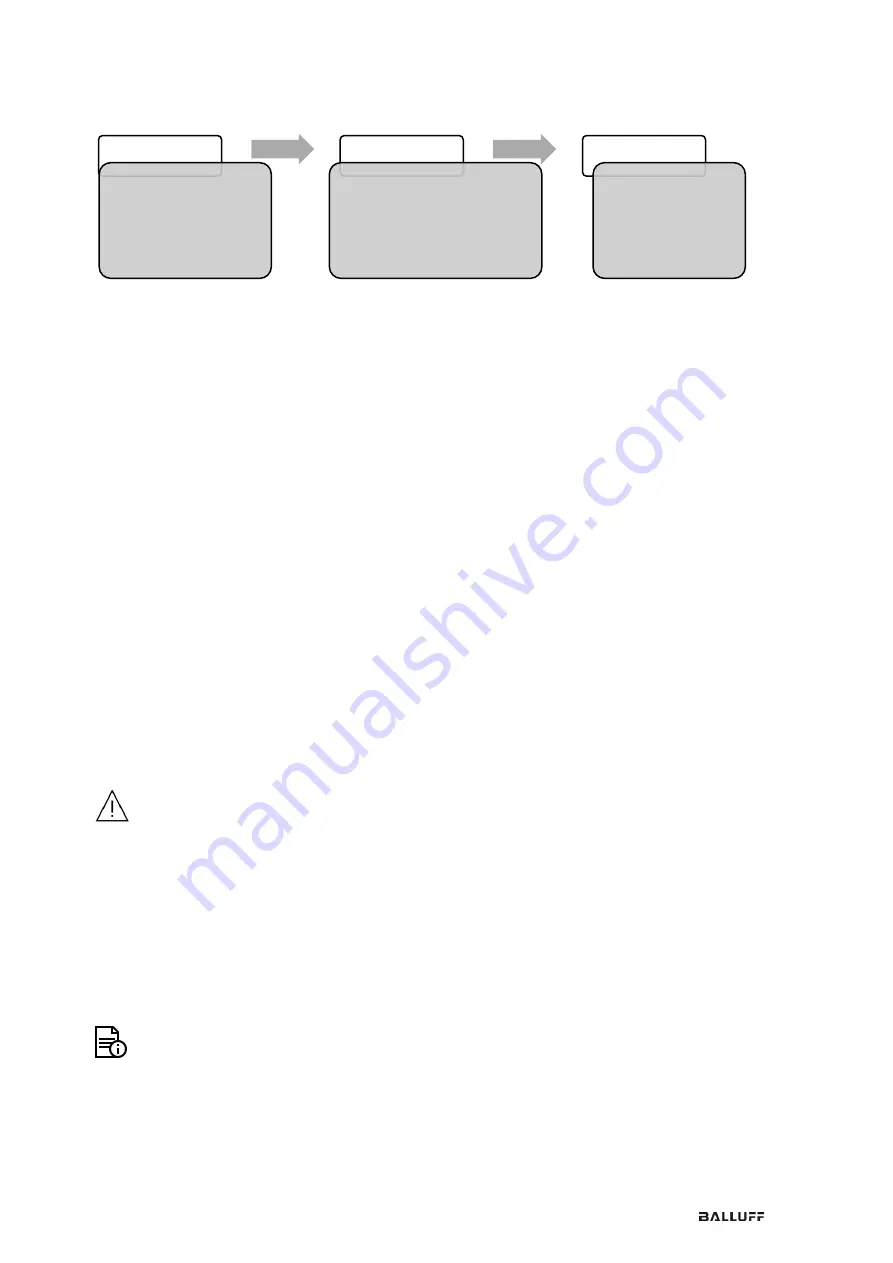
MEMS Sampling
•
6 DOF raw outputs
•
Sampling rate 1000 Hz
Fusion Algorithm
•
Function mode
•
Application profiles
•
User adjustable parameters
•
Calculation rate 100 Hz
•
Max. angular rate 500°/s
•
Max. acceleration 1.5 g
Digital Filters
•
Output filter
•
Moving average filter







































































