





























- 60 -
No.JXC#-OMX0009-A
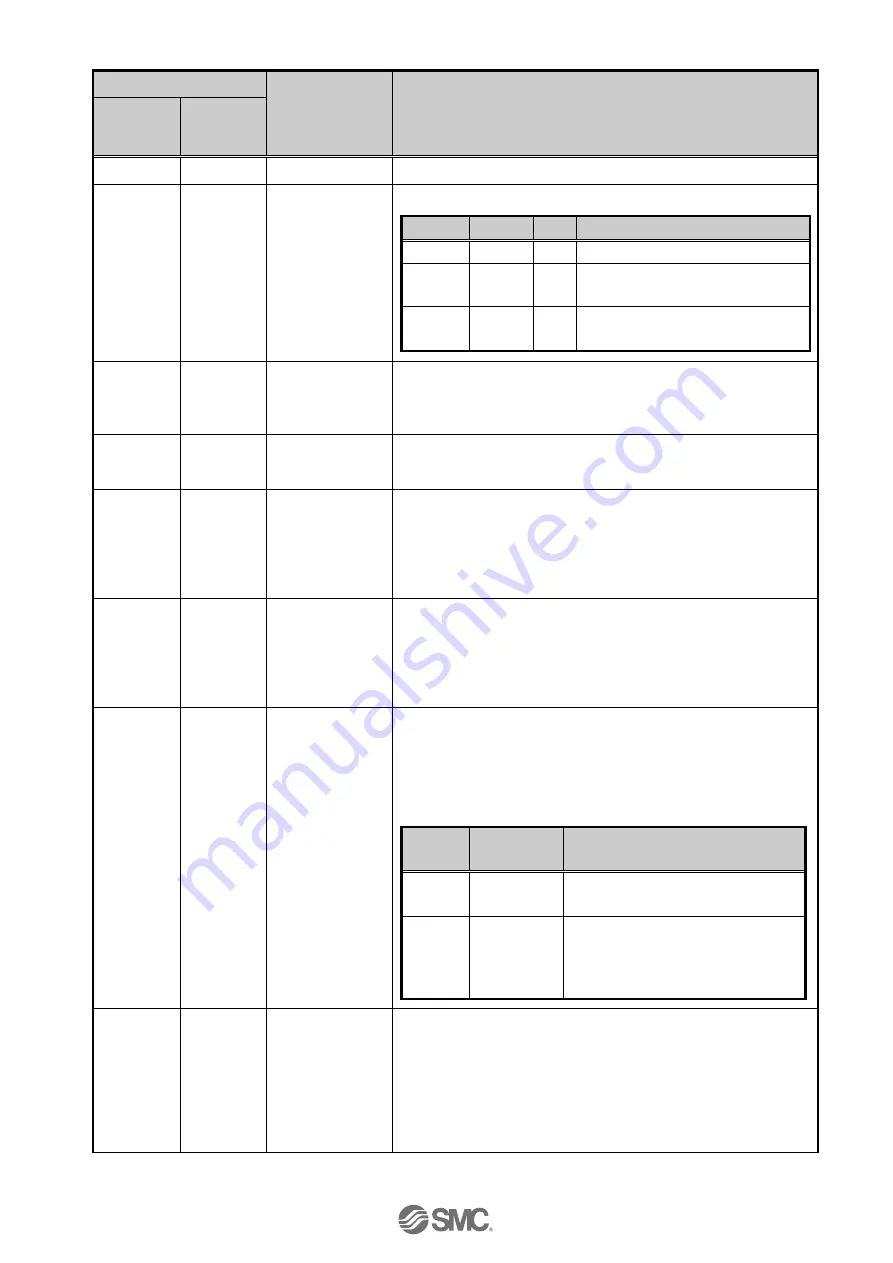
Step Data details
Description
Range
Explanation
Controller
setting
software
Teaching
box
(TB)
No.
Step No.
0 to 63
Number of the step data.
Movement
mode
Movement
mode
3 types
(Refer to the table
on the right)
Specifies the co-ordinate system for the target position.
Software
TB
PLC
Details
Blank
Disable 0
The step data is ineffective.
Absolute Absolute 1
The target position will be defined in
relation to the absolute origin point.
Relative
Relative 2
The target position will be defined
relative to the current position.
Speed
Speed
Minimum value to
“Max speed” of
the basic
parameter
*1)
The speed to move to the target position. (Unit: mm/s)
Position
Position
Basic parameter
"Stroke (-)" -
"Stroke (+)"
The target position (unit: mm)
Acceleration
Acceleration
1
to
Basic
parameters
"Maximum
acceleration/
deceleration
speed"
Sets the acceleration to reach to travel speed. (Unit: mm/s
2
)
Deceleration
Deceleration
1 to Basic
parameters
"Maximum
acceleration/
deceleration
speed"
Sets the deceleration from travel speed to stop. (Unit: mm/s
2
)
Pushing
force
Pushing
force
0 or
Minimum value to
“Max force” of the
basic parameter
*1)
The setting to define the pushing operation or the positioning
operation.
For the positioning operation, the value specifies the force as a
percentage of the maximum force (Unit: %).
The maximum force depends on the actuator. Please refer to the
manual and the rated force of the actuator.
Value
Movement
mode
Details
0
Positioning
operation
The actuator moves to the position
specified in the "Position".
1 to 100
Pushing
operation
The actuator moves to the position
specified in the "Position" and then,
performs a pushing action with a
force not more than the set force.
Trigger LV Trigger LV
Minimum value to
“Max force” of the
basic parameter
*1)
■Effective only for the pushing operation
(the value for the "Pushing force" is between 1 to 100).
“Trigger LV” is the setting to define the conditions where “INP” will
turn ON. When the actuator generates a force greater than this
value, “INP” will turn ON.
This parameter is set according to the value of the pushing force or
lower. (Unit: %)
■For the positioning operation, this value is ignored.







































































