





























- 45 -
No.JXC#-OMX0009-A
30 to 3A
CC-Link
system area
-
3B
Remote
station
READY
(No used)
● Only at Half numerical data instructions
The content of Remote station READY is as
same as at Single numerical data instructions.
Please refer to the content of Rx1B.
3C to 3F
CC-Link
system area
-
40 to 6F
-
70 to 7A
CC-Link
system area
-
7B
Remote
station
READY
●Only at Full numerical data instructions
The content of Remote station READY is as
same as at Single numerical data instructions.
Please refer to the content of Rx1B.
7C to 7F
CC-Link
system area
-
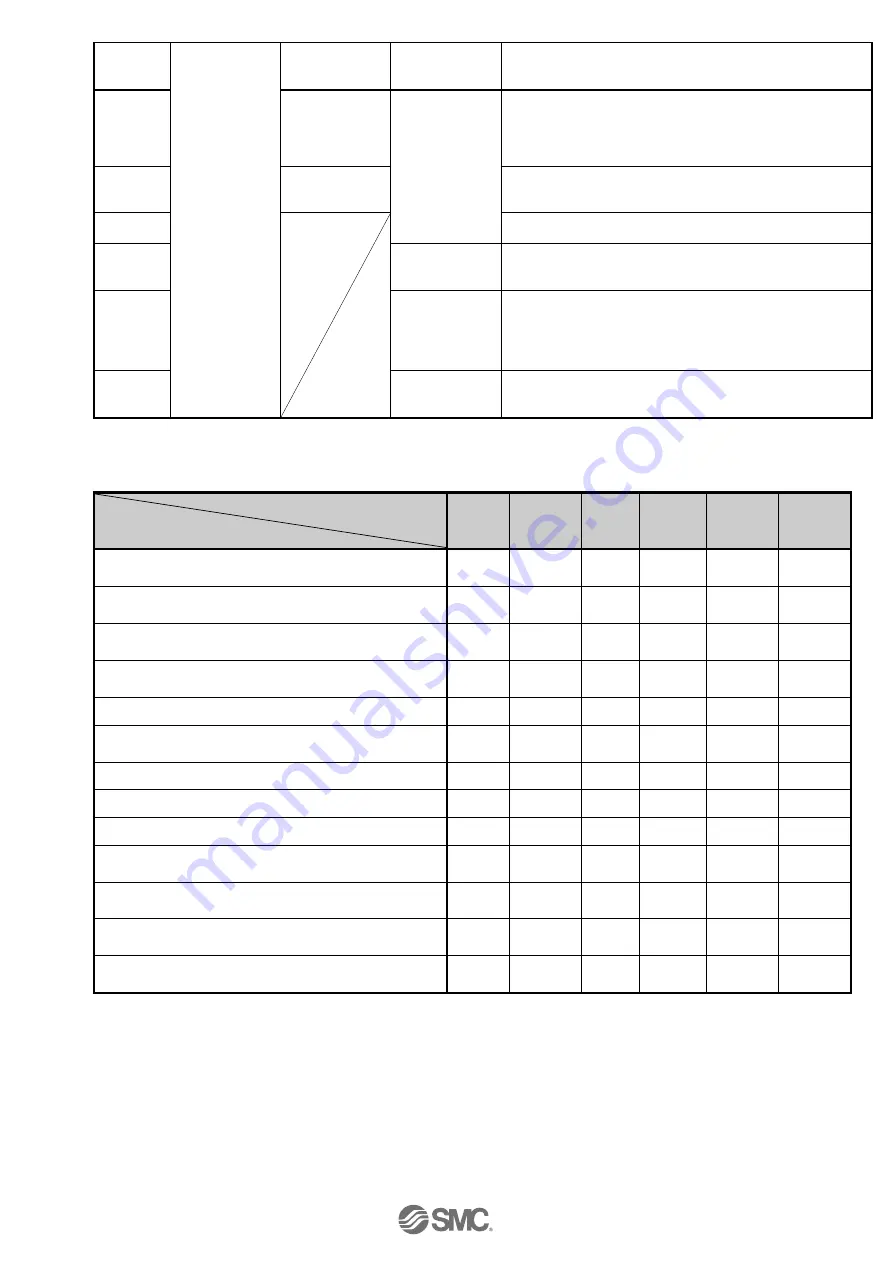
The table below shows the changes in the signal with respect to the state of the controller.
Status
Output signal
BUSY
INP
SVRE
Lock
SETON OUT0 to
OUT5
Servo is OFF when the controller is powered for
the first time.
*1)
OFF
OFF
OFF
Lock
OFF
OFF
Servo is ON when the controller is powered for the
first time
OFF
OFF
ON
Unlock
OFF
OFF
During stopping when “SVON” is OFF after turning
ON the power supply to the controller
OFF
OFF
*2
)
OFF
Lock
ON
*3
)
ON
*4)
During stopping when “SVON” is ON after turning
ON the power supply to the controller
OFF
ON
*5
)
ON
Unlock
ON
*3
)
OFF
During returning to origin
ON
OFF
ON
Unlock
OFF
OFF
The actuator is at the origin. On completion of
“SETUP”
OFF
ON
*5
)
ON
Unlock
ON
OFF
During movement by positioning/pushing operation
ON
OFF
ON
Unlock
ON
ON
*6
)
The actuator is paused by “HOLD”
OFF
OFF
ON
Unlock
ON
ON
*6
)
On completion of the positioning operation
OFF
ON
*2
)
ON
Unlock
ON
ON
*6
)
Stopped due to pushing a workload in pushing
operation
OFF
ON
ON
Unlock
ON
ON
*6
)
Stopped due to no detection of workload during a
pushing operation
OFF
OFF
ON
Unlock
ON
OFF
During stopping when “SVON” is OFF after returning
to the home position
OFF
OFF
*2
)
OFF
Lock
ON
ON
*4)
EMG signal stop from the PWR connector when the
actuator is at the origin
OFF
OFF
*2
)
OFF
Lock
ON
OFF
*1
)
Alarm “Absolute encoder ID Alarm error” is cancelled.
*2) The signal turns ON when the actuator is "In position" according to the step data.
*3
)
Return to origin completed.
*4) Retains the previous state.
*5) The signal turns ON when the actuator is within the range defined in the basic parameter setup.
*6) The output is updated on the transition (ON -> OFF) of the DRIVE input signal.







































































