
























Closed-loop thyristor current control
5-84
System- and communication configuring D7-SYS - SIMADYN D
Edition 06.2002
NOTE
The blocks use normalized values for internal calculations. This means,
in this particular case, the current setpoint and the current actual value
for the current controller CPI should be divided by the normalization
factor CAV.NF using a division block (CPI.WC/CAV.NF and
CPI.XC/CAV.NF).
Refer to the example, the following applies:
•
For DIV block 1:
−
Connect CAV.YC with X1
Enter the configured value of CAV.NF=10 at X2
Connect output Y of DIV block 1 with CPI.XC
•
For DIV block 2:
−
Connect SOL.YWC with X1
Enter the configured value of CAV.NF=10 at X2
Connect output Y of DIV block 2 with CPI.WC
The division blocks should be configured in the sequence that they are
run directly in front of the current controller block CPI!
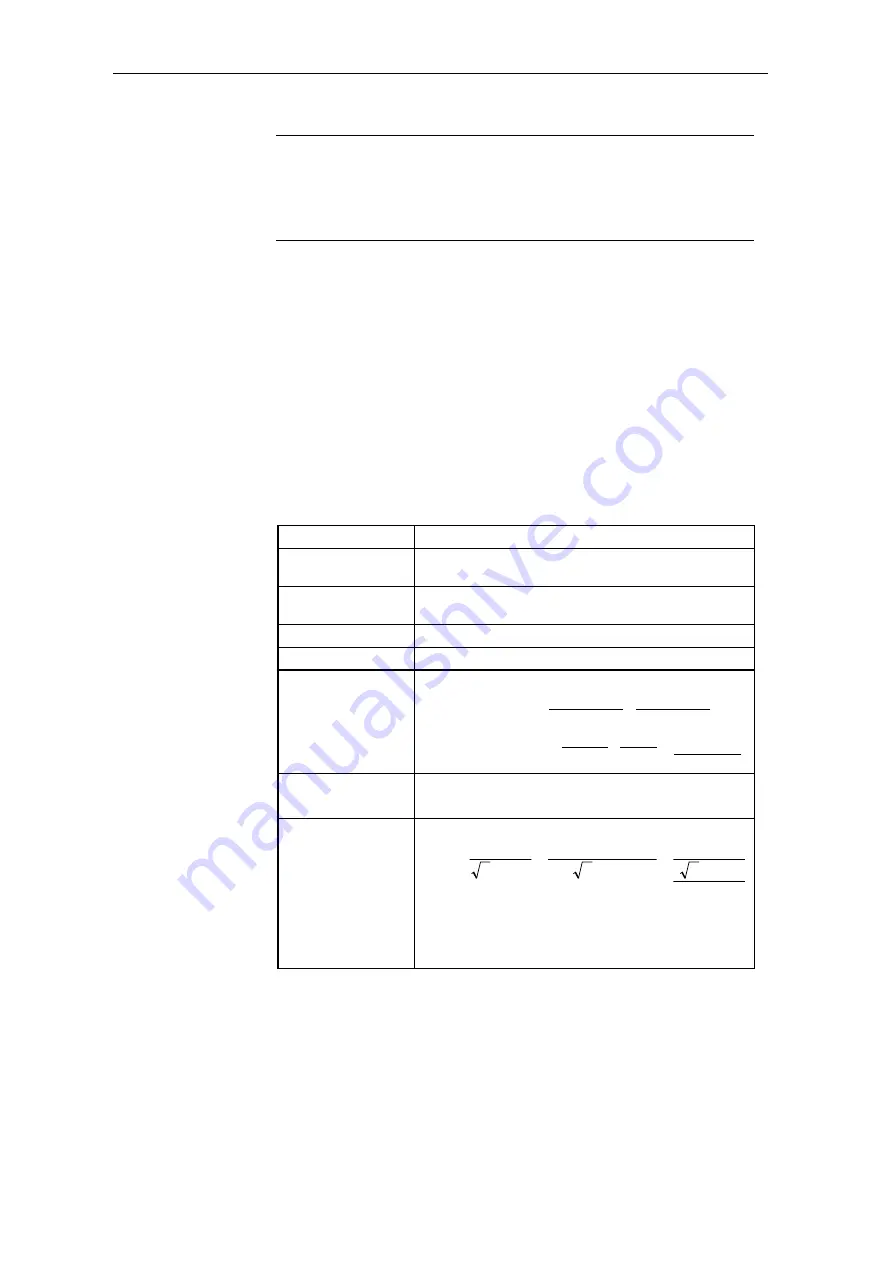
Parameter
Significance
EMF.RRV=1000 [V]
SITOR set voltage normalization [V]
voltage [V] at Vact=10 V/PT
EMF.ARV=400 [V]
Rated system/motor voltage [V]
voltage [V] for YUA=1
EMF.NF=400
Voltage normalization factor
EMF.AAV=400 [V]
Phase-to-phase line voltage [V]
EMF.RA=0,0125
Normalized armature resistance
[ ]
(
)
(
)
(
)
(
)
[ ]
[ ]
[ ]
3
10
500
10
A
10
V
400
400
m
500
RA
.
EMF
CAV
NF
CAV
ARC
EMF
ARV
EMF
NF
RA
RA
.
EMF
−
⋅
=
∗
∗
Ω
=
∗
∗
Ω
=
EMF.YEM, YUA
,YUR, YUL
Voltage actual values, normalized
400
...
0
...
400
ˆ
V
400
0
V
400
+
−
=
+
⇔
⇔
−
EMK.YEV
Pre-control
AAV
2
1
...
0
...
1
ˆ
AAV
2
400
...
0
...
400
AAV
2
YEM
YEV
⋅
+
−
=
⋅
+
−
=
⋅
=
YEV is, as shown in the normalized representation,
normalized to 1 and referred to the line supply
amplitude. For normalized and absolute values, YEV
has the same value range!
Voltage actual
value sensing







































































