





























RAINBOW ROBOTICS
RB SERIES _ USER MANUAL
© RAINBOW ROBOTICS Inc. All rights reserved.
408
E.3 Programming Method
This example does not include all the functionality provided by the tablet user interface (UI).
Only the information that is useful for monitoring by the user while moving the robot through
external control is implemented.
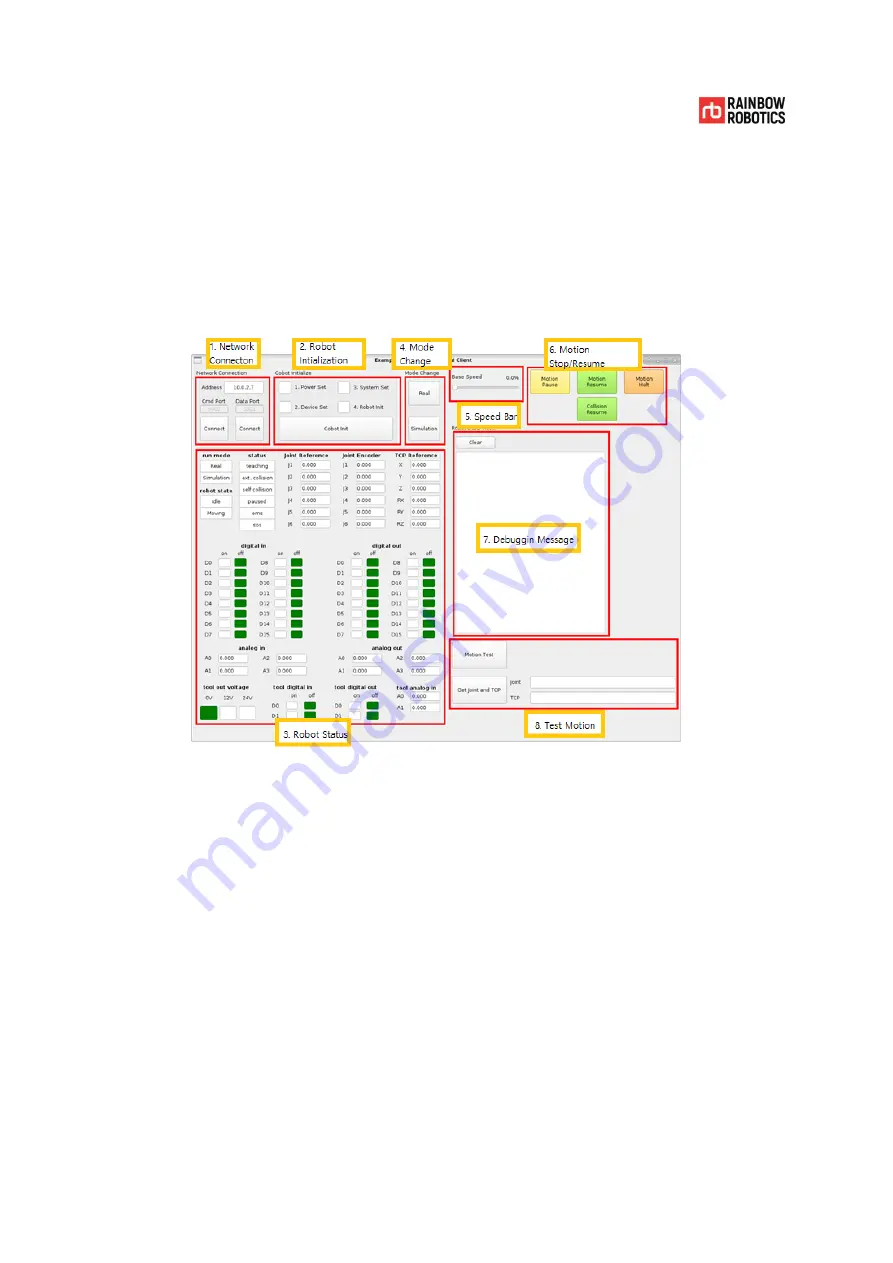
The following image is the programming UI when the example program is executed.
The function of each item is as follows.
1) Network Connection
Connect to the robot's main controller through the LAN port on the control box of
the RB5 robot. The default IP address for external control is fixed at '10 .0.2.7 '. The
server for receiving external control commands connects to port 5000, and the
server for requesting and receiving robot status information connects to port 5001.
There is a separate button for connecting each one. If the connection is successful,
the word 'Connect' on the button is changed to 'Disconnect'. The reverse happens
when the connection is lost.
Содержание RB Series
Страница 1: ...RAINBOw English RB SERIES USER MANUAL V 3 9 1 Update 2021 09...
Страница 2: ...RAINBOW ROBOTICS RB SERIES _ USER MANUAL RAINBOW ROBOTICS Inc All rights reserved 2...
Страница 80: ...RAINBOW ROBOTICS RB SERIES _ USER MANUAL RAINBOW ROBOTICS Inc All rights reserved 80 Program only Mode...
Страница 195: ...RAINBOW ROBOTICS RB SERIES _ USER MANUAL RAINBOW ROBOTICS Inc All rights reserved 195...
Страница 206: ...RAINBOW ROBOTICS RB SERIES _ USER MANUAL RAINBOW ROBOTICS Inc All rights reserved 206...
Страница 265: ...RAINBOW ROBOTICS RB SERIES _ USER MANUAL RAINBOW ROBOTICS Inc All rights reserved 265...







































































