





























Wiring
System Description Service Robotics Modules
1004870-EN-05
| 93
8.3
Wiring the robot control module (control cabinet)
The system or plant integrator must ensure that a circuit diagram is produced, dependent
on the application. The circuit diagram should be based on the information in the operating
manual for the robot control module PRCM1 and must contain all application-dependent
wiring and all configurations conditional upon the wiring.
The circuit diagram must be included in the application-dependent operating manual for the
overall plant/machine.
Please note the requirements of any application-dependent circuit diagram (see
diagram [
).
Connection and terminal assignment
}
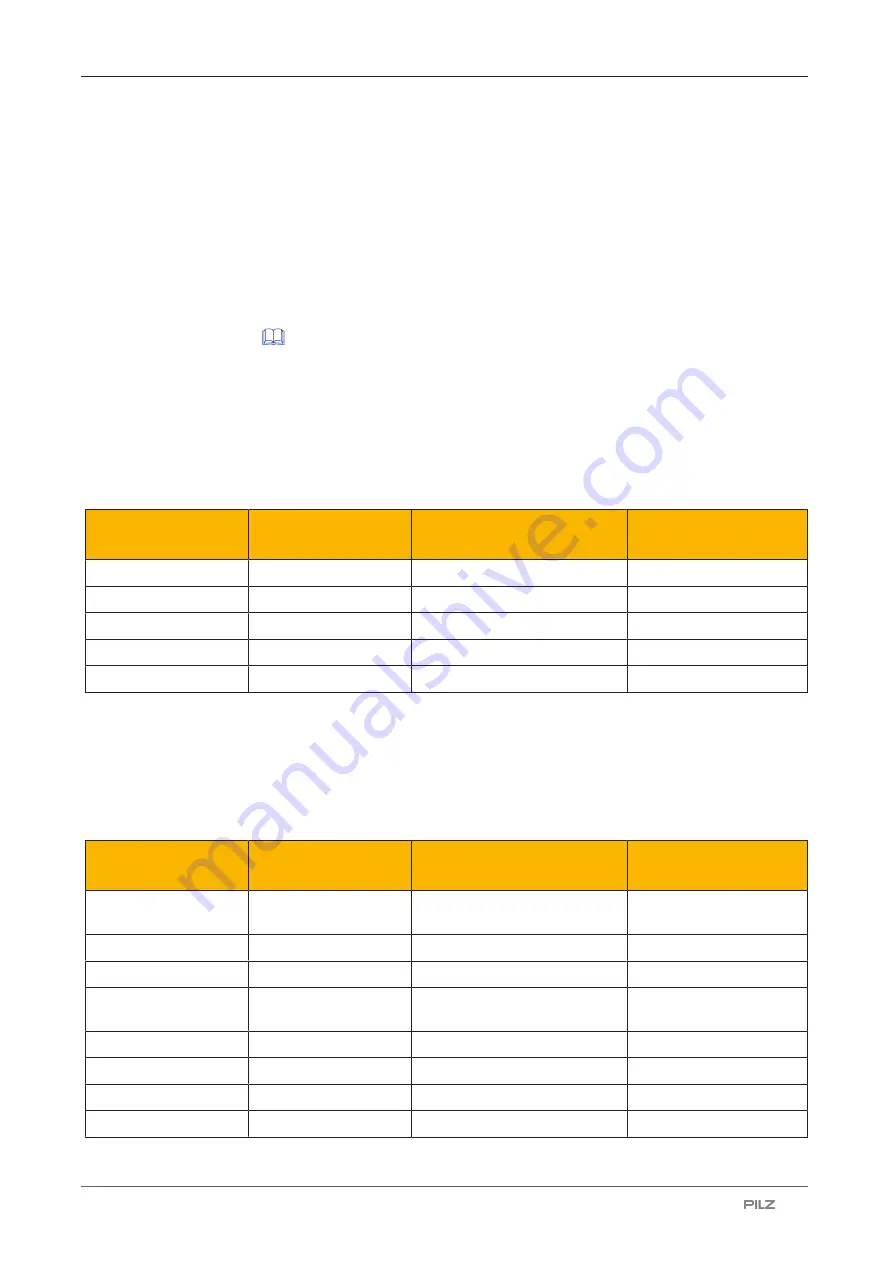
Robot arm PRBT 6 – Wiring of X1 (Power)
The following table contains the information regarding the wiring of the interface X1
(Power) on the robot arm in the control cabinet. All the labels in the table below corres-
pond to the labels in the wiring diagram (see operating manual for the robot control mod-
ule PRCM1).
Assignment of X1
(Power)
Core number
Wiring destination
<Terminal><Connection>
Control cabinet ter-
minal
24V PRBT
1
X4 1B
X4
GND Endeff
2
X4 12B
X4
GND PRBT
3
X4 11B
X4
24V Endeff
4
X4 2B
X4
PE6
PE
X0 PE3
X0
}
Robot arm PRBT 6 – Wiring of X2 (Signal)
The following table contains the information regarding the wiring of the interface X2 (Sig-
nal) on the robot arm in the control cabinet. All the labels in the table below correspond to
the labels in the wiring diagram (see operating manual for the robot control module
PRCM1).
Assignment of X2
(Signal)
Core colour
<Abbr.> (<Colour>)
Wiring destination:
<Terminal><Connection>
Wiring destination:
Device
STO A
WH (white)
A1.5 11
Safety control system
PSS 4000
CAN1 H
BU (blue)
40A1 X52 (Sub-D)
Motion controller
CAN1 L
RD (red)
40A1 X52 (Sub-D)
Motion controller
STO Bf
BN (brown)
A1.5 21
Safety control system
PSS 4000
CAN1 GND
GN (green)
40A1 X52 (Sub-D)
Motion controller
- - -
YE (yellow)
- - -
- - -
- - -
GY (grey)
- - -
- - -
- - -
PK (pink)
- - -
- - -







































































