

























Technical details
System Description Service Robotics Modules
1004870-EN-05
| 114
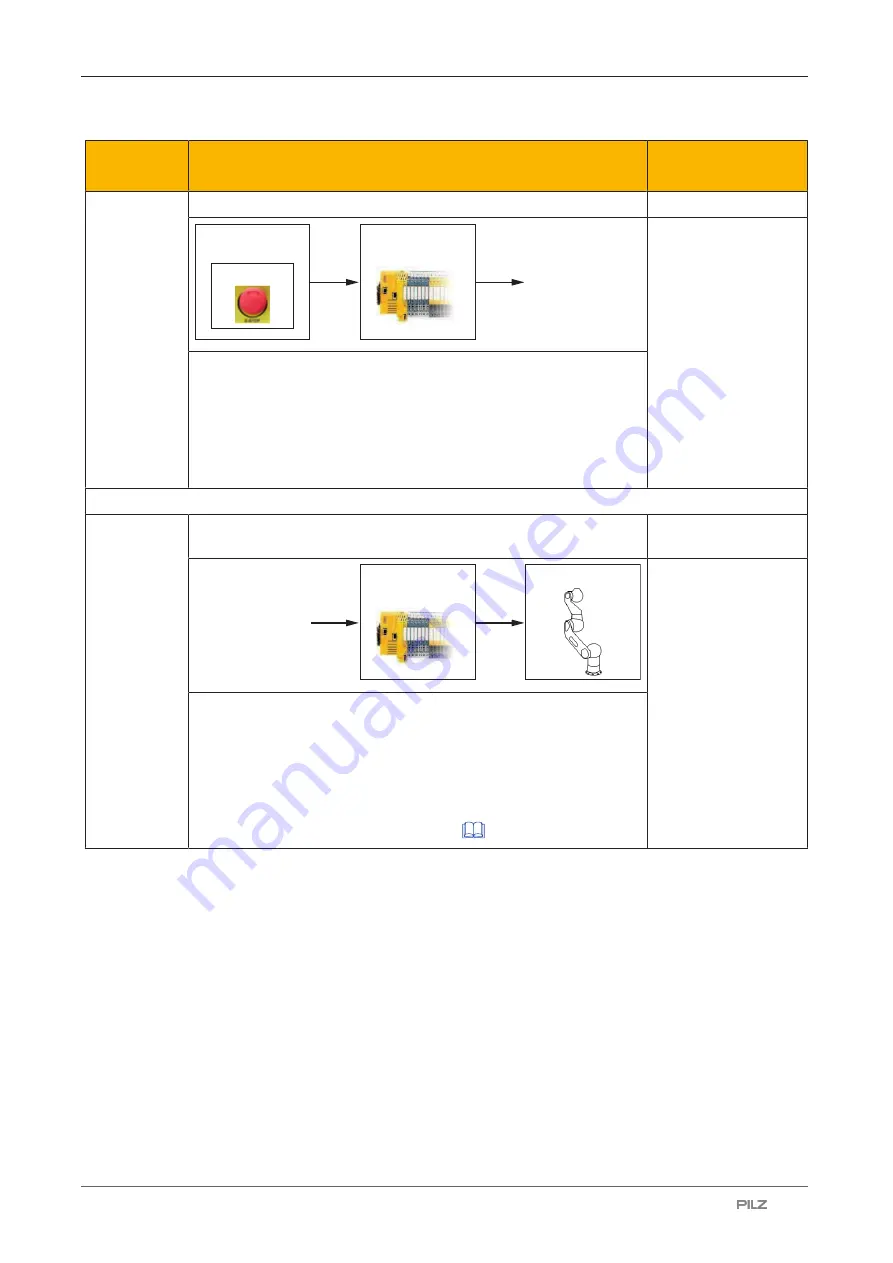
Safety func-
tions
Description
Safety integrity
SRCF 06
Safety function: Emergency stop status
Safety control system
(PSS 4000)
Robot arm
Teach pendant
Emergency stop pushbutton
Subsystem:
}
PFH
D
: 8,92 E-09
}
PLd
Please note: The
safety characteristic
value of the external
signalling device (e.g.
indicator lights) must
be taken into account
in the safety charac-
teristic value of the full
safety function.
}
SRCF 06 is determined by the following components:
– Emergency stop pushbutton on the teach pendant
– Safety controller from the automation system PSS 4000
}
External interfaces:
– 1 x digital FS output, 2-channel
SRCF 7.1,
SRCF 7.2
Protective stop function for "automatic" operating mode: Ex-
ternal safety device (PSENmlock 1, PSENmlock 2)
Safety control system
(PSS 4000)
Robot arm
Subsystem:
}
PFH
D
: 9.37 E-09
}
PLd
Please note: The
safety characteristic
value of the external
safety device PSENm-
lock 1, PSENmlock 2
must be taken into ac-
count in the safety
characteristic value of
the full safety function.
}
SRCF 7.1 and SCRF 7.2 are determined by the following com-
ponents:
– Safety controller from the automation system PSS 4000
– Robot arm
}
External interfaces:
See
Connections for external devices [
All the units used within a safety function must be considered when calculating the safety
characteristic data.







































































