





























Goodrive350 series high-performance multifunction VFD
Basic operation guidelines
-56-
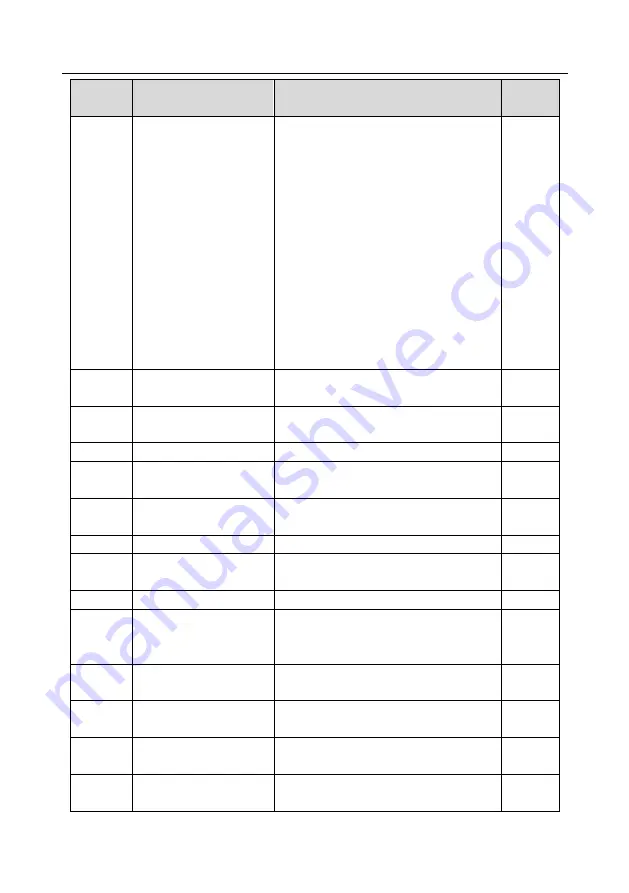
Function
code
Name
Description
Default
value
cases where the motor cannot be
disconnected from load;
3: Static autotuning 2 (partial autotuning);
when current motor is motor 1, only
P02.06, P02.07 and P02.08 will be
autotuned; when current motor is motor 2,
only P12.06, P12.07 and P12.08 will be
autotuned.
4: Rotary autotuning 2, which is similar to
rotary autotuning 1 but is only applicable to
asynchronous motors.
5: Rotary autotuning 3 (partial autotuning),
which is only applicable to asynchronous
motors.
P02.00
Type of motor 1
0: Asynchronous motor
1: Synchronous motor
0
P03.00
Speed loop proportional
gain 1
0
–200.0
20.0
P03.01
Speed loop integral time 1 0.000
–10.000s
0.200s
P03.02
Switching low point
frequency
0.00Hz
–P03.05
5.00Hz
P03.03
Speed loop proportional
gain 2
0
–200.0
20.0
P03.04
Speed loop integral time 2 0.000
–10.000s
0.200s
P03.05
Switching high point
frequency
P03.02
–P00.03 (Max. output frequency)
10.00Hz
P03.06
Speed loop output filter
0
–8 (corresponds to 0–2
8
/10ms)
0
P03.07
Electromotion slip
compensation coefficient of
vector control
50%
–200%
100%
P03.08
Brake slip compensation
coefficient of vector control
50%
–200%
100%
P03.09
Current loop proportional
coefficient P
0
–65535
1000
P03.10
Current loop integral
coefficient I
0
–65535
1000
P03.11
Torque setting method
1: Keypad (P03.12)
2: AI1
1





















































