





























Summa Series Servodrive Product Manual
Summa Series AC Drive
Document Version: V1.01
(Dec, 2019)
© 2019 ESTUN Automation Co., Ltd. All right reserved.
1-5
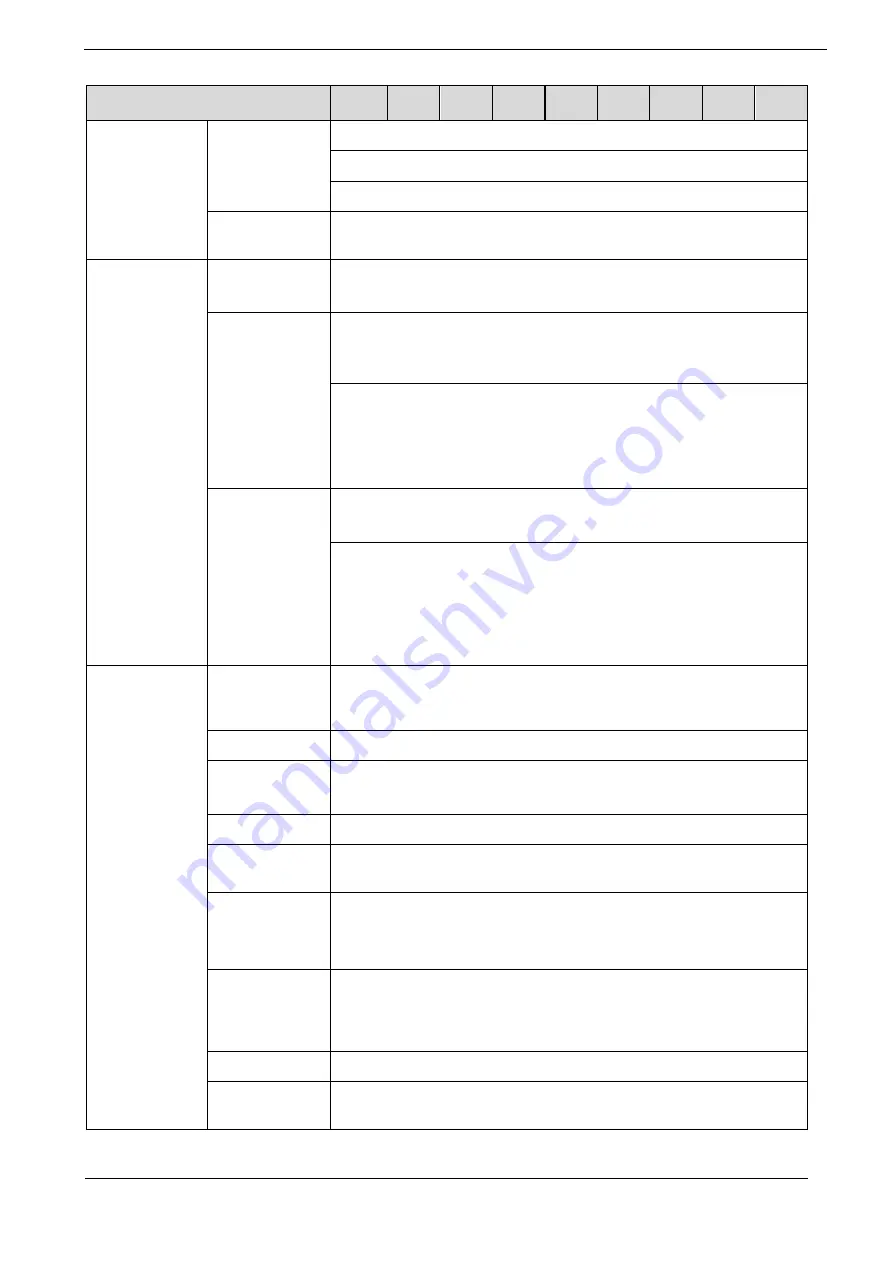
Drive Model: ED3S-
A5A* 01A* 02A* 04A* 08A* 10A* 15A* 20A* 30A*
Coefficient of
Speed
Fluctuation
±0.01% of rated speed max. (For a load fluctuation of 0% to 100%)
0% of rated speed max. (For a load fluctuation of ±10%)
±0.1% of rated speed max. (For a temperature fluctuation of 25°C±25°C)
Soft Start Time
Setting
0 s to 10 s (Can be set separately for acceleration and deceleration.)
I/O Signals
Encoder Divided
Pulse Output
Phase A, phase B, phase C: Line-driver output.
Number of divided output pulses: Any setting is allowed.
Input Signals
Allowable voltage range: 24 VDC ±20%
Number of input points: 7 (2 of them are high-speed optocoupler inputs,
fixed as Touch Probe)
Input Signals are EXT1 (Touch Probe 1), EXT2 (Touch Probe 2), ALM-
RST (Alarm Reset), N-OT (Reverse Drive Prohibit), P-OT (Forward Drive
Prohibit), P-CON (Proportional Control), S-ON (Servo ON).
Except EXT1 and EXT2, a signal can be allocated and the positive and
negative logic can be changed
Output Signals
Allowable voltage range: 5 VDC to 30 VDC
Number of output points: 4 (1 of them fixed for Servo Alarm)
Output Signals are TGON (Rotation Detection), ALM (Servo Alarm),
SRDY (Servo Ready), COIN (Positioning Completion), PAO (Encoder
Divided Pulse, Phase A), PBO (Encoder Divided Pulse, Phase B), PCO
(Encoder Divided Pulse, Phase C).
Except ALM, a signal can be allocated and the positive and negative logic
can be changed.
EtherCAT
Communications
Applicable
Communications
Standards
IEC 61158 Type12, IEC 61800-7 CiA402 Drive Profile
Physical Layer
100BASE-TX (IEEE802.3)
Communications
Connectors
CN3-IN (RJ45): EtherCAT signal input connector
CN4-OUT (RJ45): EtherCAT signal output connector
Cable
Category 5, 4 shielded twisted pairs
Sync Manager
SM0: Mailbox output, SM1: Mailbox input, SM2: Process data output, and
SM3: Process data input
FMMU
FMMU 0: Mapped in process data output (RxPDO) area.
FMMU 1: Mapped in process data input (TxPDO) area.
FMMU 2: Mapped to mailbox status.
EtherCAT
Commands
(Data Link
Layer)
APRD, FPRD, BRD, LRD, APWR, FPWR, BWR, LWR, ARMW, FRMW
(APRW, FPRW, BRW, and LRW commands are not supported.)
Process Data
Assignments can be changed with PDO mapping.
MailBox (CoE)
Emergency messages, SDO requests, SDO responses, and SDO information
(TxPDO/RxPDO and remote TxPDO/RxPDO are not supported.)







































































