





























Summa Series Servodrive Product Manual
Tuning
Document Version: V1.01
(Dec, 2019)
© 2019 ESTUN Automation Co., Ltd. All right reserved.
9-23
Right Axis: Select
Sample Type
as
None
,
Speed
,
Position
, or
Offset
.
The setting
Offset
indicates the deviation of the sample type (speed or position) selected by the left
axis.
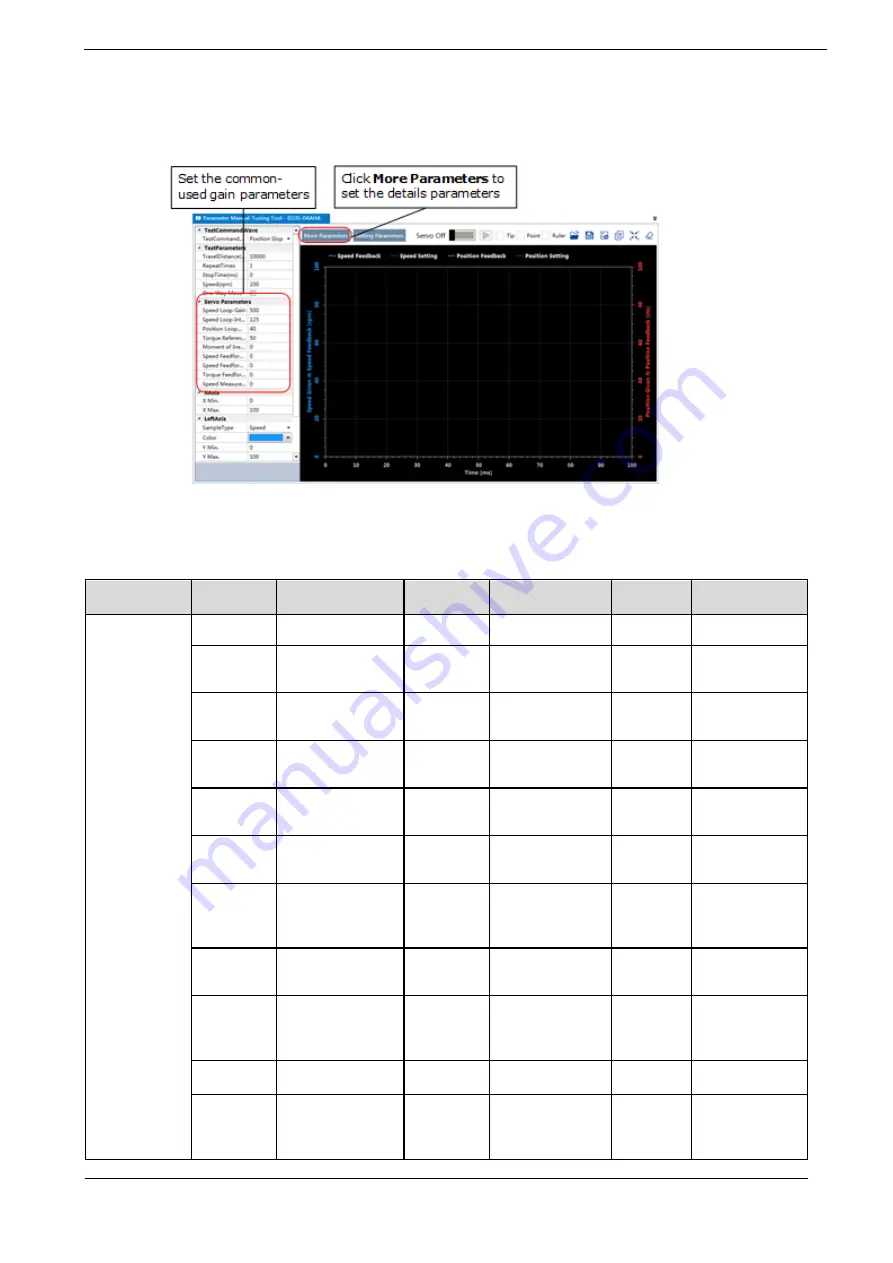
Step 5
Set the necessary parameters for the Servo gain.
The parameters that may be used are shown in Table 9-3.
Table 9-3
The parameters that may be used
Type
Parameter Name
Range
Unit
Default
When Enabled
Gain
Pn102
Speed Loop Gain
1 to 10000
rad/s
500
Immediately
Pn103
Speed Loop
Integral Time
1 to 5000
0.1ms
125
Immediately
Pn104
Position Loop
Gain
0 to 1000
1/s
40
Immediately
Pn105
Torque Command
Filter Time
0 to 2500
0.01ms
50
Immediately
Pn106
Load Inertia
Percentage
0 to 9999
%
0
Immediately
Pn107
Second Speed
Loop Gain
1 to 10000
rad/s
250
Immediately
Pn108
Second Speed
Loop Integral
Time
1 to 5000
0.1ms
200
Immediately
Pn109
Second Position
Loop Gain
0 to 1000
1/s
40
Immediately
Pn110
Second Torque
Reference Filter
Time
0 to 2500
0.01ms
100
Immediately
Pn116
P/PI Switch Mode
0 to 4
-
0
After restart
Pn117
Torque Reference
Threshold for
P/PI Switch
0 to 300
200
%
Immediately







































































