





























Summa Series Servodrive Product Manual
Application Functions
Document Version: V1.01
(Dec, 2019)
© 2019 ESTUN Automation Co., Ltd. All right reserved.
7-4
7.3.3
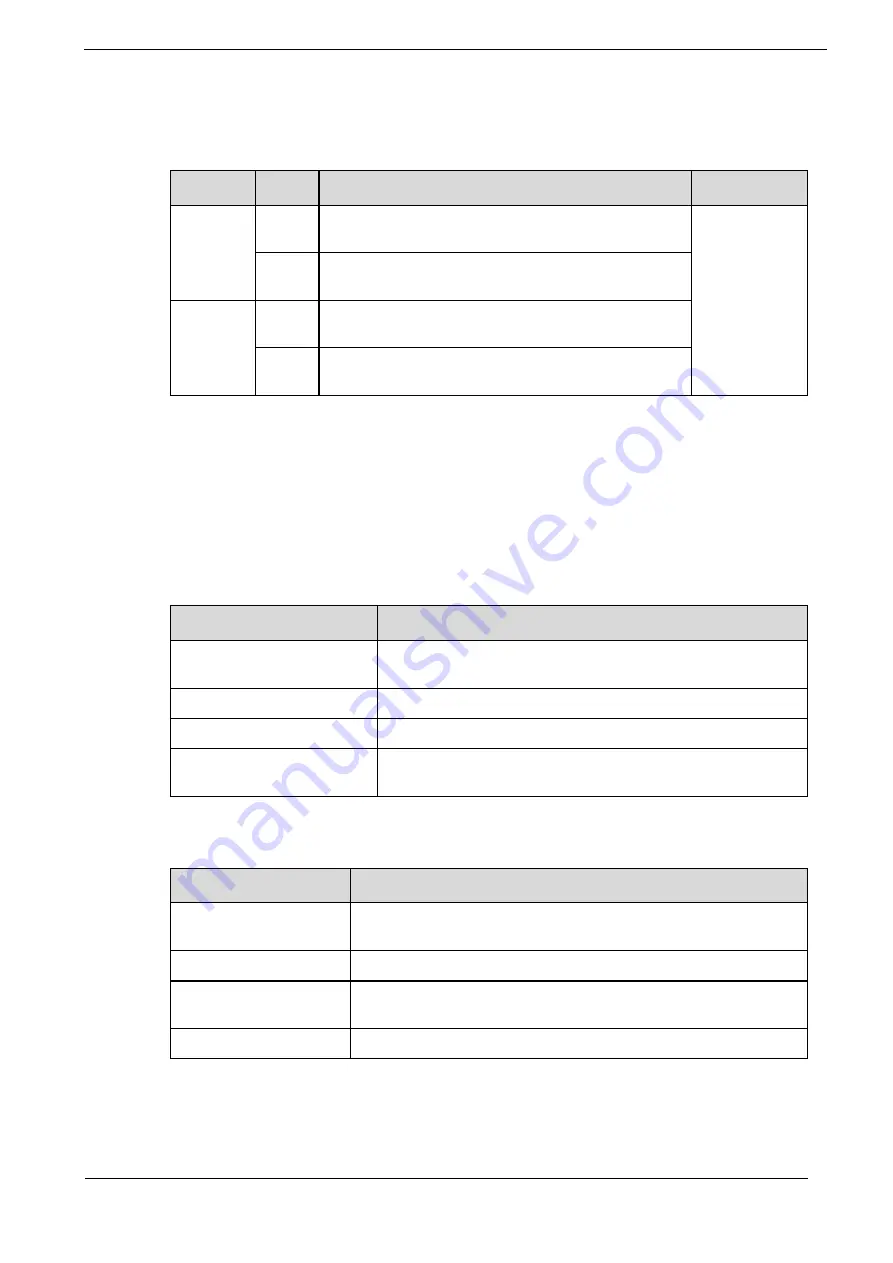
Enabling/Disabling the Overtravel Signal
Parameters can be set to disable the overtravel signal. If the parameters are set, there is no need to wire
the overtravel input signal.
Parameter Setting Meaning
When Enabled
Pn000.1
0
Inputs the Forward Drive Prohibited (P-OT) signal from
CN1-16. [Default]
After restart
1
Disables the Forward Drive Prohibited (P-OT) signal.
(Always allow forward rotation)
Pn000.2
0
Inputs the Reverse Drive Prohibited (N-OT) signal from
CN1-15. [Default]
1
Disables the Reverse Drive Prohibited (N-OT) signal.
(Always allow reverse rotation)
In addition, you can disable the overtravel limit function by not set the values
1
and
2
to parameter Pn509
(not allocate the P-OT signal and N-OT signal).
7.4
Motor Stop Methods
There are four methods to stop the Motor when an alarm (Gr.1 or Gr.2) occurs, in Safe state, or Servo
OFF.
Stop method
Meaning
Stop by dynamic brake
The electric circuits are internally connected to stop the Motor
quickly.
Coast to a stop
The Motor stops naturally due to friction during operation.
Reverse brake
Emergency stop torque is used to decelerate the Motor to a stop.
Do not stop, regard as a
warning
Regards Alarms as the Warnings, and the Motor will not be stopped.
There are four ways of states after the Motor is stopped:
Motor after Stopping
Meaning
Coast
The Drive does not control the Motor (The machine will move in
response to a force from the load).
Dynamic Brake (DB)
The electric circuits are internally connected to hold the Motor.
Zero clamping
A position loop is created and the Motor remains stopped at a position
reference of 0. (The current stop position is held.)
Operation
The state in which the Drive continues to control the Motor.







































































