





























Summa Series Servodrive Product Manual
CiA402 Drive Profile
Document Version: V1.01
(Dec, 2019)
© 2019 ESTUN Automation Co., Ltd. All right reserved.
6-69
6.7
Torque Control
6.7.1
Profile Torque (PT) Mode
In this mode of operation, the host controller gives the target torque in 6071h and torque slope in 6087h to
the Drive. Torque control is performed by the Drive. The Drive regulates the speed when the speed
reaches the limit.
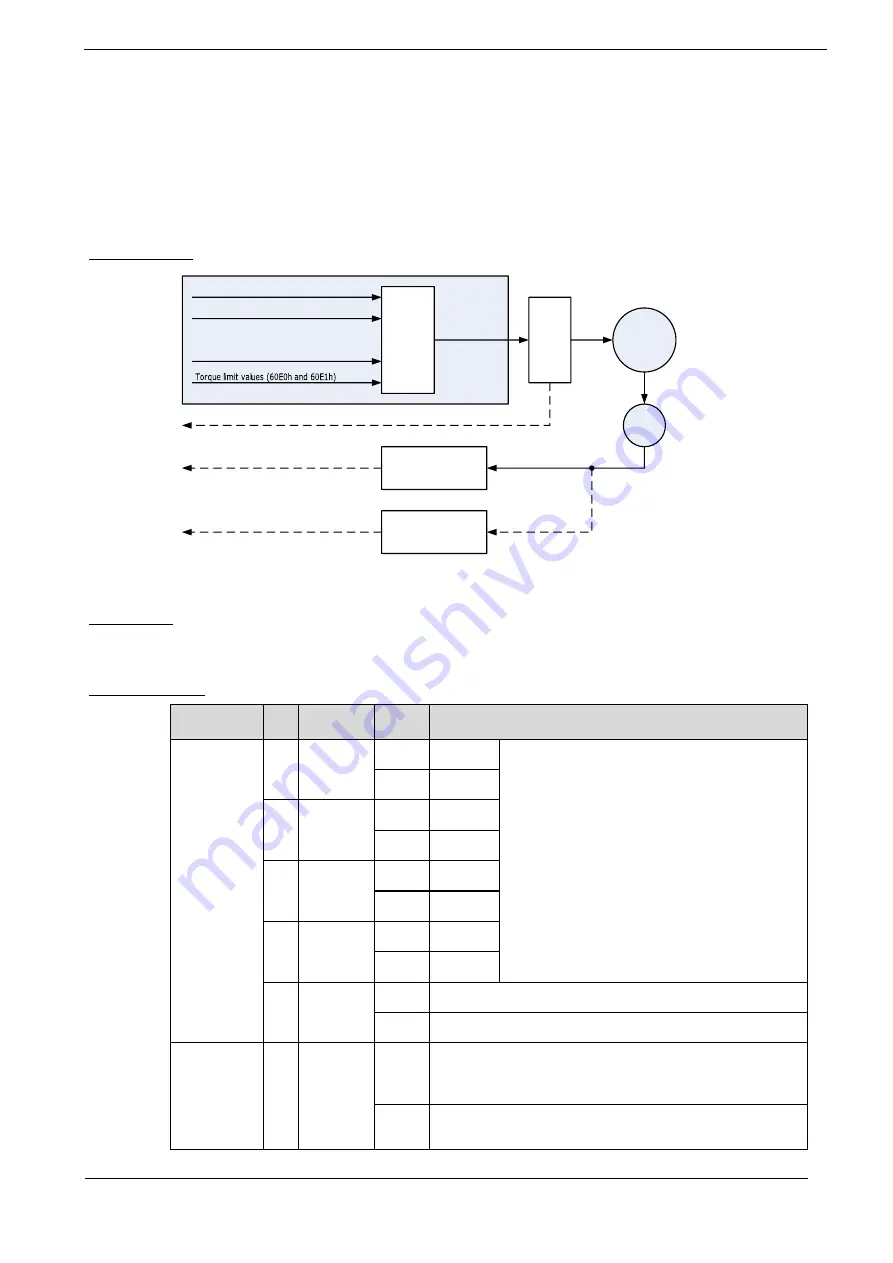
Block Diagram
Torque
trajectory
generator
Target torque (6071h)
Velocity gear ratio
6094-02h:6094-01h
Position gear ratio
6093-01h:6093-02h
Torque actual value (6077h)
Position actual
internal value
(6063h)
Torque
demand
value
(6074h)
Encoder
Motor
Torque slope (6087h)
Max torque (6072h)
Torque
control
Velocity actual value (606Ch)
Position actual value (6064h)
Speed Limit
The speed limit is determined by the smaller of 6080h value and 607F value.
Relevant Objects
Object
Bit Name
Value Description
Controlword
6040h
0
Switch
on
0
Disabled
If Bit0 to Bit3 are all 1, the Drive starts running.
1
Enabled
1
Enable
voltage
0
Disabled
1
Enabled
2
Quick
stop
0
Disabled
1
Enabled
3
Enable
operation
0
Disabled
1
Enabled
8
Halt
0
Executes or continues operation.
1
Stops the axis according to
Halt Option Code
(605Dh)
Statusword
6041h
10
Target
reached
0
Halt (Bit 8 in Controlword) = 0: Target position not
reached
Halt (Bit 8 in Controlword) = 1: Axis decelerates
1
Halt (Bit 8 in Controlword) = 0: Target position reached
Halt (Bit 8 in Controlword) = 1: Velocity of axis is 0







































































