





























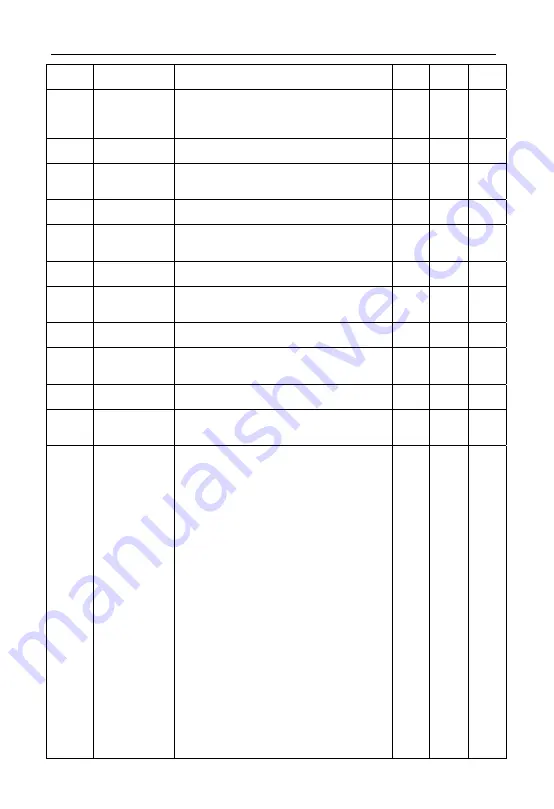
Function parameter schedule graph
39
arriving the
detection width
F09.24 positive
and
negative logic
setup of Output
terminal
0000
~
FFFF(extension valid)
1 0000
○
F09.25 Y1
output
closed
delay time
0.000
~
50.000s 0.001s
0.000s
○
F09.26 Y1
output
disconnected delay
time
0.000
~
50.000s 0.001s
0.000s
○
F09.27 Y2
output
closed
delay time
0.000
~
50.000s 0.001s
0.000s
○
F09.28 Y2
output
disconnected delay
time
0.000
~
50.000s 0.001s
0.000s
○
F09.29 Y3
output
closed
delay time
0.000
~
50.000s 0.001s
0.000s
○
F09.30 Y3
output
disconnected delay
time
0.000
~
50.000s 0.001s
0.000s
○
F09.31 Y4
output
closed
delay time
0.000
~
50.000s 0.001s
0.000s
○
F09.32 Y4
output
disconnected delay
time
0.000
~
50.000s 0.001s
0.000s
○
F09.33 RLY1
output
closed delay time
0.000
~
50.000s 0.001s
0.000s
○
F09.34 RLY1
output
disconnected delay
time
0.000
~
50.000s 0.001s
0.000s
○
F09.35 Analog
output(AO1)
selection
0: Output frequency before slip compensation
(0.00Hz~upper limit frequency)
1: Output frequency after slip Compensation
(0.00Hz~upper limit frequency)
2: Setup frequency(0.00Hz~upper limit frequency)
3: Main setting frequency(0.00Hz~upper limit
frequency)
4: Auxiliary setting frequency(0.00Hz~upper limit
frequency)
5: Output current 1(0 ~2×inverter rated current)
6: Output current 2(0 ~3×motor rated current)
7: Output voltage(0 ~1.2×load motor rated voltage)
8: Busbar voltage(0 ~1.5×rated busbar voltage)
9: Motor speed(0~3 rated speed)
10: PID provision(0.00~10.00V)
11: PID feedback(0.00~10.00V)
12: AI1(0.00~10.00V or 4~20mA)
13: AI2(-10.00~10.00V or 4~20mA)
14: Communication provision
15: Motor rotor revolving speed(0.00Hz
~
upper
limit frequency)
16: Present setting torque(0
~
2 times rated Torque)
17: Present output torque(0
~
2 times rated Torque)
18: Present torque current (0
~
2 times motor
rated current)
19: Present flux current(0
~
1 times motor rated
1
0
○
ENC







































































