



























Accelnet Plus Micro Modules User Guide
16-01687 Rev 03
Copley Controls
Page 13 of 139
C
ONTROL
L
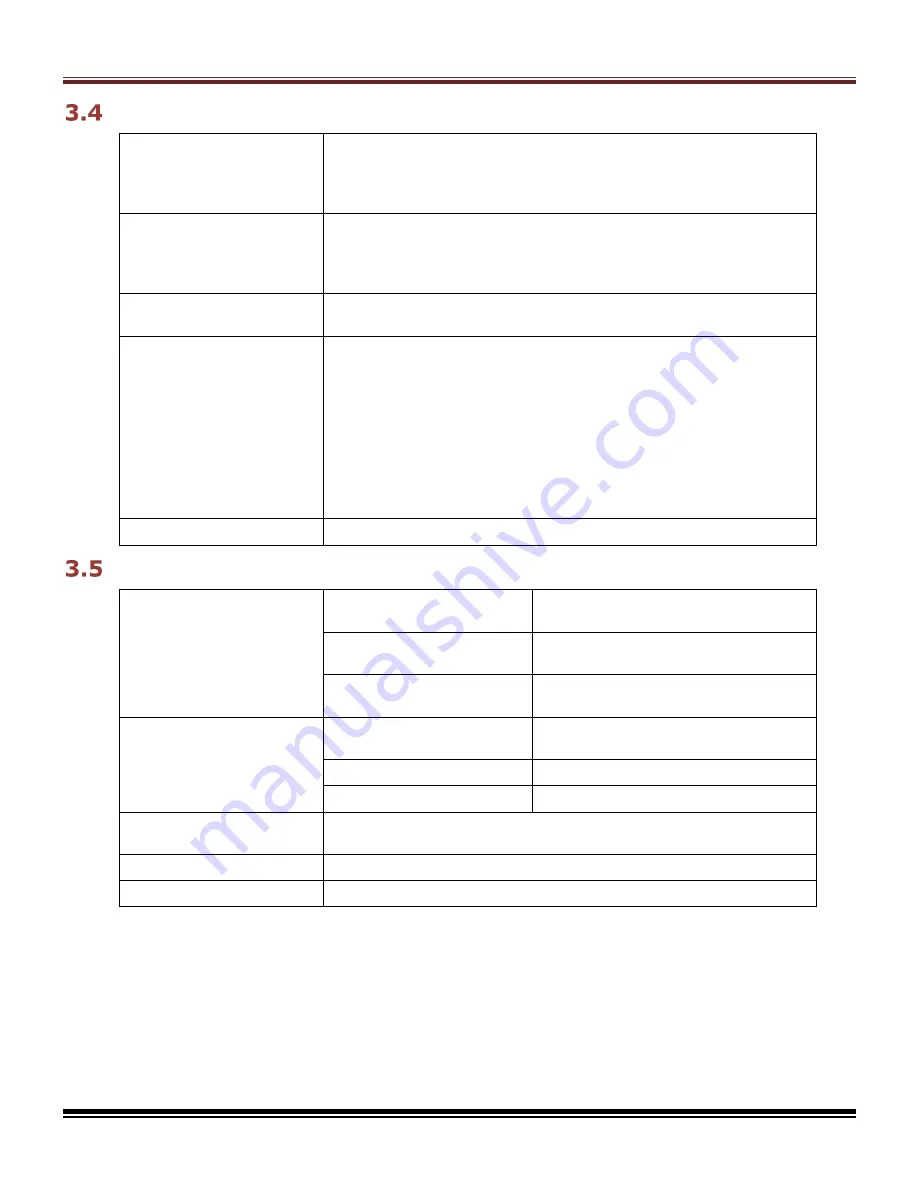
OOPS
Type
Current
Velocity
Position
100% digital.
Sampling rate (time)
Current
Velocity
Position
16 kHz (62.5 µs)
4 kHz (250 µs)
4 kHz (250 µs)
Current Loop Small Signal
Bandwidth
> 2.5 kHz (Typical, tuning and load impedance dependent)
Digital Filters
Programmable:
Analog Reference Input
Velocity Loop Input
Velocity Loop Output1
Velocity Loop Output2
Velocity Loop Output3
Current Loop Input1
Current Loop Input2
Input Shaping
Velocity loop output filter1 default: is 200 Hz low pass.
Bus Voltage Compensation
Changes in +HV voltage do not affect tuning.
D
IGITAL
C
OMMAND
I
NPUTS
Digital Position Command
Pulse and direction,
Count up / Count down
Maximum rate:
2 MHz (with active driver)
Pulse, count minimum
width
220 ns
Quadrature A/B encoder
maximum rate
2 M line/sec (8 M count/sec after
quadrature)
Digital Current & Velocity
Command
PWM and Polarity
PWM = 0~100%, Polarity = 1/0
PWM Frequency: 1~100 kHz
PWM 50%
PWM: 50% ±50%, 1~100 kHz
PWM Minimum pulse width
220 ns
Indexing
Up to 32 sequences can be launched from digital inputs or
ASCII commands
Camming
Up to 10 CAM tables can be stored in flash memory
Serial ASCII
RS-232 *, 9600~230,400 Baud, 3-wire
*
Format is RS-232, TxD, RxD, Gnd but voltage levels are TTL.
An external circuit is required if RS-232 voltages are needed.
This circuit is provided in the EZ Boards and EZ Development Boards.







































































