





























Accelnet Plus Micro Modules User Guide
16-01687 Rev 03
Copley Controls
Page 118 of 139
D
IGITAL
I
NPUT
C
OMMANDS
T
HREE
F
ORMATS
In position mode, the drive can accept position commands via two digital inputs, using one of
these signal formats: pulse and direction, count up/count down, and quadrature.
In all three formats, the drive can be configured to invert the command.
P
ULSE
S
MOOTHING
In position mode, the drive’s trajectory generator ensures smooth motion even when the
command source cannot control acceleration and deceleration rates.
When using digital or analog command inputs, the trajectory generator can be disabled by
setting the Max Accel limit to zero. (Note that when using the CAN bus, serial bus, EtherCAT,
or CVM Control Program, setting Max Accel to zero prevents motion.)
P
ULSE AND
D
IRECTION
F
ORMAT
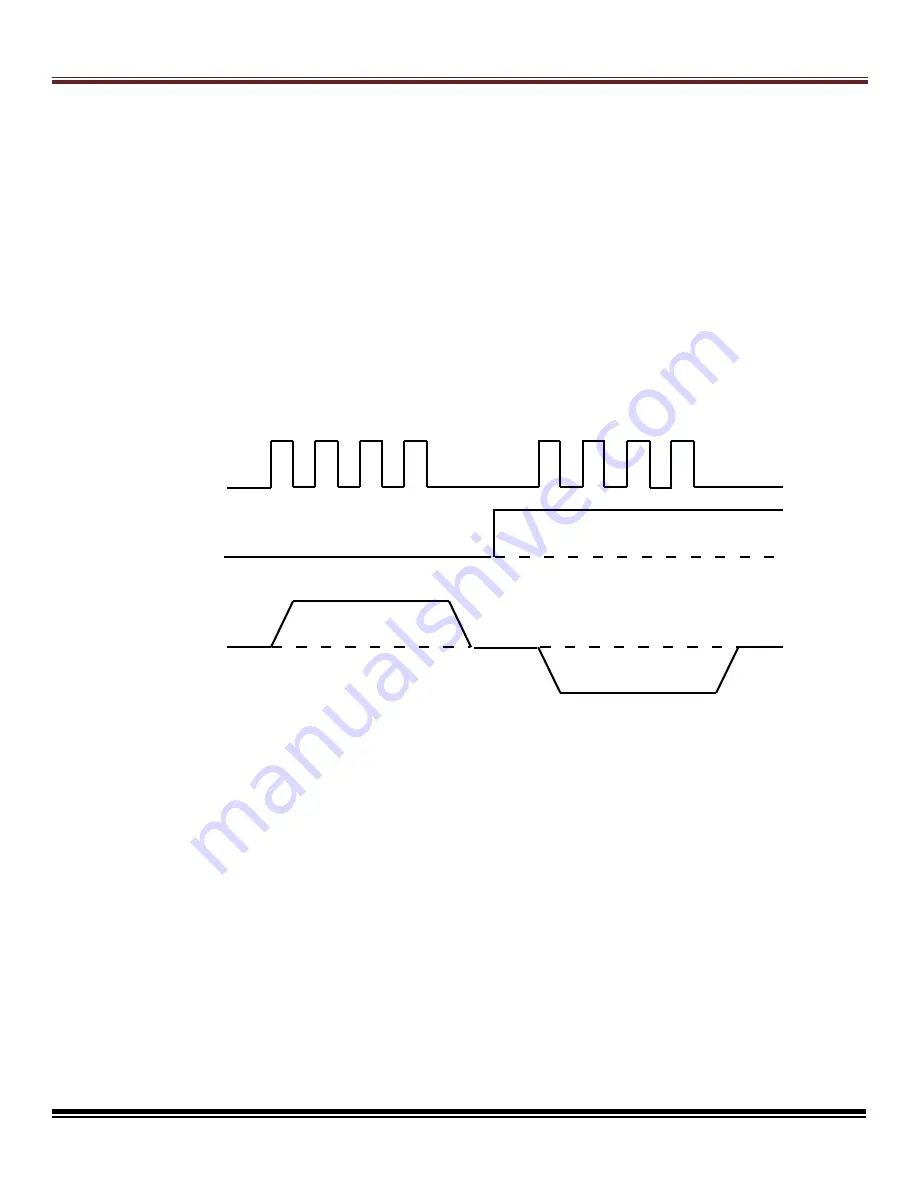
In pulse and direction format, one input takes a series of pulses as motion step commands,
and another input takes a high or low signal as a direction command, as shown below.
The drive can be set to increment position on the rising or falling edge of the signal. Stepping
resolution can be programmed for electronic gearing.
Pulse Input
Velocity
Command
Direction Input







































































