





























Accelnet Plus Micro Modules User Guide
16-01687 Rev 03
Copley Controls
Page 19 of 139
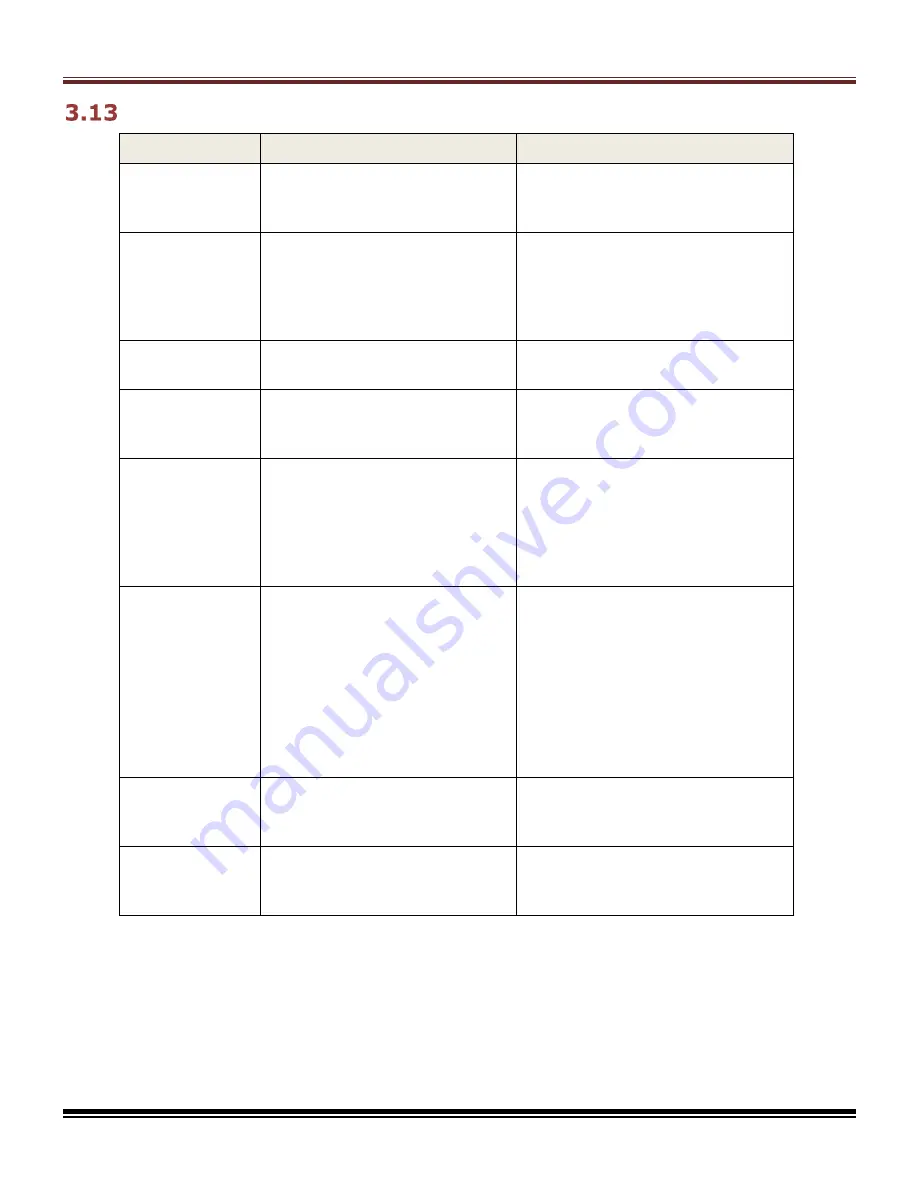
N
ETWORK
I
NTERFACES
Specification
AEV, AEZ
APV, APZ
Signals
Ethernet 100BASE-TX:
RX1+, RX1-, TX1+, TX1-
RX2+, RX2-, TX2+, TX2-
CAN_H, CAN_L, CAN_Gnd
(CAN +5 Vdc Pass though only)
Isolation
Magnetics
External required for AEV
Integral in EZ board and
EZ Development Board
RJ-45 sockets
2-channel isolated transceiver on
APV feeds through directly to sockets
on APZ and EZ board
Data Format
EtherCAT
CAN V2.0b physical layer for high-
speed connections compliant
Protocol
CANopen Application protocol
over EtherCAT (CoE) based on
CiA 402
CiA 402: CANopen device profile for
drives and motion control
Supported Modes
Cyclic Synchronous Position,
Velocity, Torque (CSP, CSV, CST),
Cyclic Synchronous Torque with
Commutation Angle (CSTCA),
Profile Current, Velocity, and
Position, PVT, and Homing
Profile Current, Velocity, and
Position, PVT, and Homing.
Node Address
Selection
AEV: Slaves are automatically
assigned addresses based on
their position on the bus. Station
Alias address can be saved to
flash memory.
AEZ: Two 16-position
hexadecimal rotary switches
define a cabling-independent
Station Alias.
APV: Node address can be defined by
inputs, or saved to flash memory
APZ: Two 16-position hexadecimal
rotary switches on EZ board.
OR programmable digital inputs
OR stored in flash memory
OR combination of above.
Cable
AEZ: Cat 5 or Cat-5e minimum
100 m maximum length between
nodes
APZ: Cat 5 or Cat-5e minimum with
121
terminator across CAN_H and
CAN_L on last node in the chain.
Bus Termination
No termination required.
A 121
resistor across CAN_H and
CAN_L at the CAN master, and at the
last device on the CAN network.







































































