





























Accelnet Plus Micro Modules User Guide
16-01687 Rev 03
Copley Controls
Page 43 of 139
D
IGITAL
C
OMMAND
I
NPUTS
:
P
OSITION
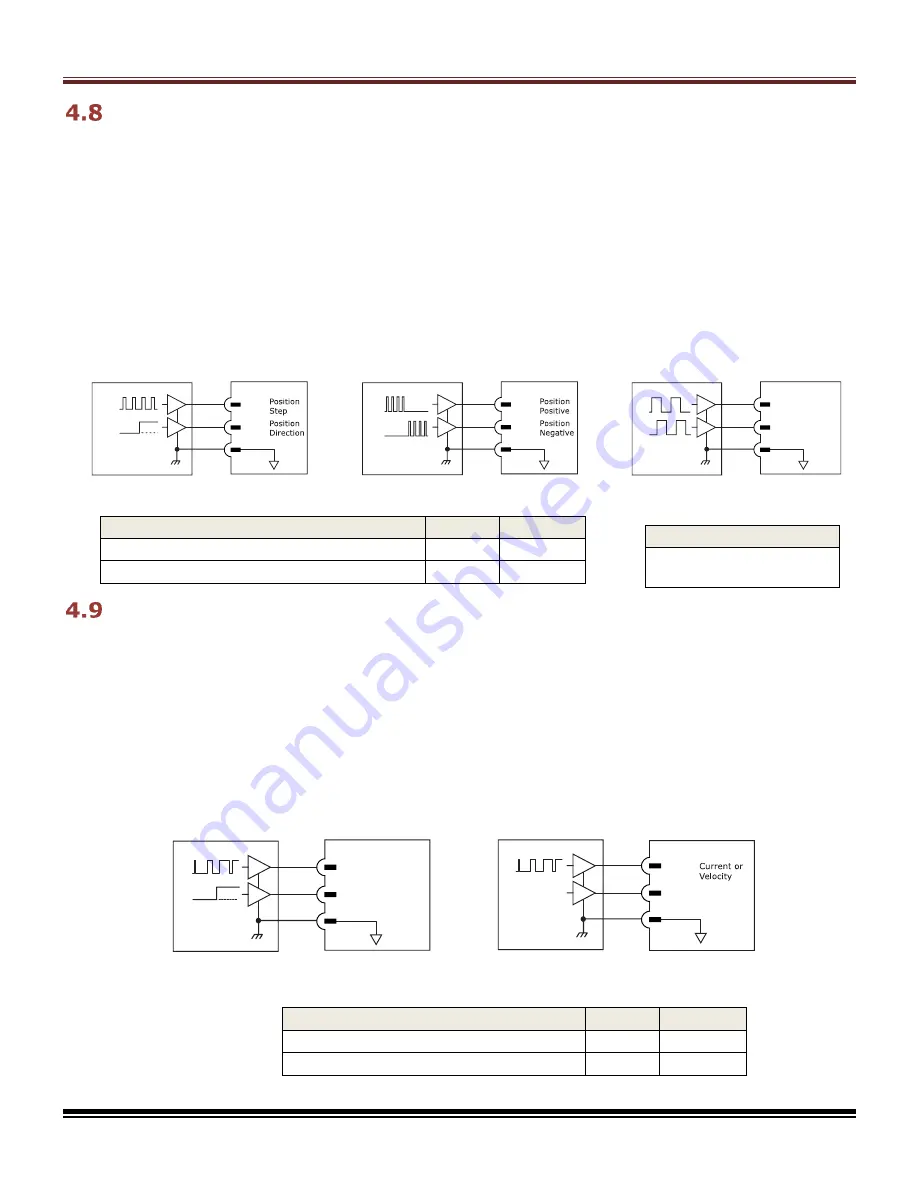
Stand-Alone Mode digital POSITION-CONTROL Inputs
AEV-APV work with motion controllers that output pulses to command position.
These formats are supported:
•
Step/Direction
•
Count-Up/Count-Down (CU/CD)
•
A/B Quadrature Encoder
In Step/Direction mode, a pulse-train controls motor position, and the direction is controlled
by a DC level at the Direction input. CU/CD (Count-Up/Count-Down) signals command the
motor to move CW or CCW depending on which input the pulse-train is directed to. The
motor can also be operated in an electronic gearing mode by connecting the inputs to a
quadrature encoder on another motor. In all cases the ratio between input pulses and motor
revolutions is programmable.
STEP/DIRECTION INPUTS
COUNT-UP/COUNT-DOWN INPUTS
QUAD A/B ENCODER INPUTS
D
IGITAL
C
OMMAND
I
NPUTS
:
V
ELOCITY
,
T
ORQUE
Stand-Alone Mode Digital VELOCITY/TORQUE CONTROL Inputs
AEV-APV work with motion controllers that output pulses to command velocity and torque
(current). These formats are supported:
•
PWM/Direction
•
50 % PWM
In PWM/Direction mode, a pulse-train with variable duty-cycle controls motor Vel/Trq, and
the polarity or direction is controlled by HI/LO levels at the Direction input.
With 50% PWM operation there is a single signal. A 50% duty cycle produces zero output.
Increasing the duty cycle to 100% produces a full-scale output in one direction and 0% duty
cycle produces a full-scale output in the opposite direction.
*
PWM/DIRECTION INPUTS
50% PWM
IN3
IN
SGND
STP
DI
2 AEV, APV
IN3
IN
SGND
CU
CD
2 AEV, APV
Encoder A
Encoder
IN3
IN
SGND
A
2 AEV, APV
2 AEV, APV
I N 3 P M
Direc tion
I N
SGND
Duty 0 100
I N 3
N o unc tion
I N
Sgnd
no connection
Duty 50 50
2 AEV, APV
Command Options
Signal
J2 Pins
Step, Position Positive, Encoder A
IN3
7
Direction, Position Negative, Encoder B
IN4
8
J2 Sgnd Pins (APV)
3,4,18,31,32,33,34,42,
49,50,59,60 (19~24)
Command Options
Signal
J2 Pins
PWM Vel/Trq, 50% PWM +/- Vel/Trq
IN3
7
Hi/Lo Direction, No connection
IN4
8





















































