





























Accelnet Plus Micro Modules User Guide
16-01687 Rev 03
Copley Controls
Page 117 of 139
PWM
I
NPUT
C
OMMANDS
T
WO
F
ORMATS
The drive can accept a pulse width modulated signal (PWM) signal to provide a current
command in current mode and a velocity command in velocity mode. The PWM input can be
programmed for two formats: 50% duty cycle (one-wire) and 100% duty cycle (two-wire).
50%
D
UTY
C
YCLE
F
ORMAT
(O
NE
-W
IRE
)
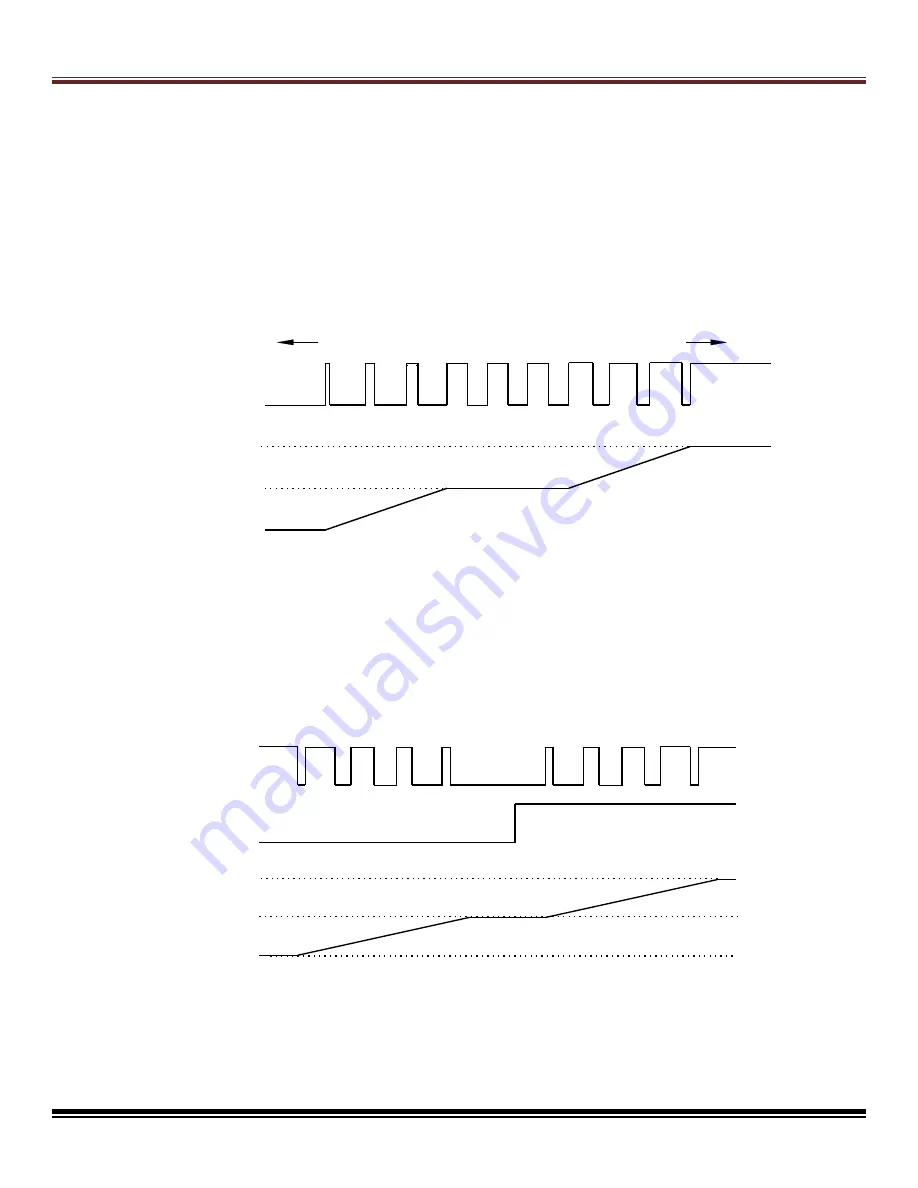
The input takes a PWM waveform of fixed frequency and variable duty cycle. As shown below,
a 50% duty cycle produces zero output from the drive. Increasing the duty cycle toward 100%
commands a positive output, and decreasing the duty cycle toward zero commands a negative
output.
The command can be inverted so that increased duty cycle commands negative output and
vice versa.
100%
D
UTY
C
YCLE
F
ORMAT
(T
WO
-W
IRE
)
One input takes a PWM waveform of fixed frequency and variable duty cycle, and the other
input takes a DC level that controls the polarity of the output. A 0% duty cycle creates a zero
command, and a 100% duty cycle creates a maximum command level. The command can be
inverted so that increasing the duty cycle decreases the output and vice versa.
P
ROTECTION FROM
0
OR
100%
D
UTY
C
YCLE
C
OMMANDS
In both formats, the drive can be programmed to interpret 0 or 100% duty cycle as a zero
command. This prevents the 0% or 100% commands that would result from a controller
failure or a cable break which could result in the input pulled up to +5V or pulled-down to
Signal Ground (0V).
Decreasing Duty Cycle
Increasing Duty Cycle
Max -
Max +
0
PWM Input
Amplifier Output
50 % Duty Cycle
Max +
0
PWM Input
Amplifie r Output
Dire ction Input
100%
Duty Cycle
100%
Duty Cycle
Min -







































































