





























Accelnet Plus Micro Modules User Guide
16-01687 Rev 03
Copley Controls
Page 42 of 139
E
THER
CAT
C
OMMUNICATIONS
EtherCAT is the open, real-time Ethernet network developed by Beckhoff based on the
widely used 100BASE-TX cabling system. EtherCAT enables high-speed control of
multiple axes while maintaining tight synchronization of clocks in the nodes. Data
protocol is CANopen application protocol over EtherCAT (CoE) based on CiA 402 for
motion control devices. More information on EtherCAT can be found on this web-site:
http://ethercat.org/default.htm
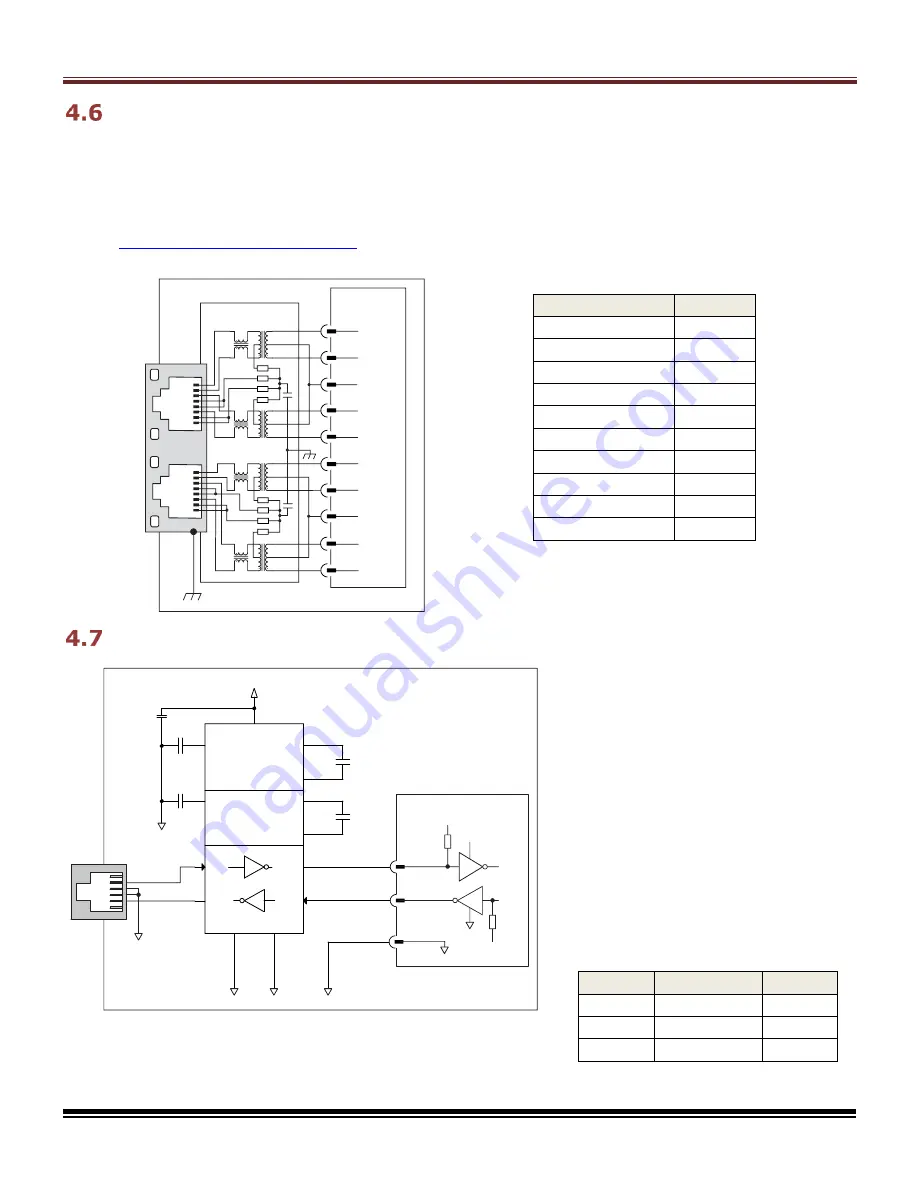
RS-232
C
OMMUNICATIONS
The serial port is a full-duplex,
three-wire (RxD, TxD, Sgnd) type
that operates from 9,600 to 230,400
Baud. It can be used by CME for
drive configuration and setup or by
external equipment sending ASCII
commands. The circuit shown here is
used on the EZ board and is
recommended for user's PC boards.
It converts the single-ended TTL
signals levels in the AEV into the
ANSI RS-232 levels which are the
standard for serial communications
and computer COMM ports.
1
1
EtherCAT
User oard
Magnetics
IN
OUT
T 1
2 AEV
11
12
1
T 1
1
Tx x1
3.3V
Tx x2
3.3V
T 2
2
T 2
2
GND
Signal
J2 Pins
27
ECATTX1-
29
+3.3V_TXRX1
19
24
ECATRX1-
26
23
ECATTX2-
25
+3.3V_TXRX2
21
20
ECATRX2-
22
RS-232
Signal
J2 Pins
RxD
ASYNC_RXD
28
TxD
ASYNC_TXD
30
SGND
SGND
32
User oard
SGND
xD
7 VC2G1
10k
10k
3.3V
3.3V
3.3V
TxD
TD
D
AS NC T D
AS NC D
0.1U
0.1U
ADM3101E
2
TIN
GND
6
TOUT
IN
PADD E
13
T
OUT
3
6.6V TO 6.6V
V
C2
10
C2
11
3.3V TO 6.6V
C1 1
V
VCC
C1
12
S232 T ANSCEIVE
3.3V
5
S232T
S232
7
0.1U
0.1U
0.1U
S 232
2





















































