





























Accelnet Plus Micro Modules User Guide
16-01687 Rev 03
Copley Controls
Page 96 of 139
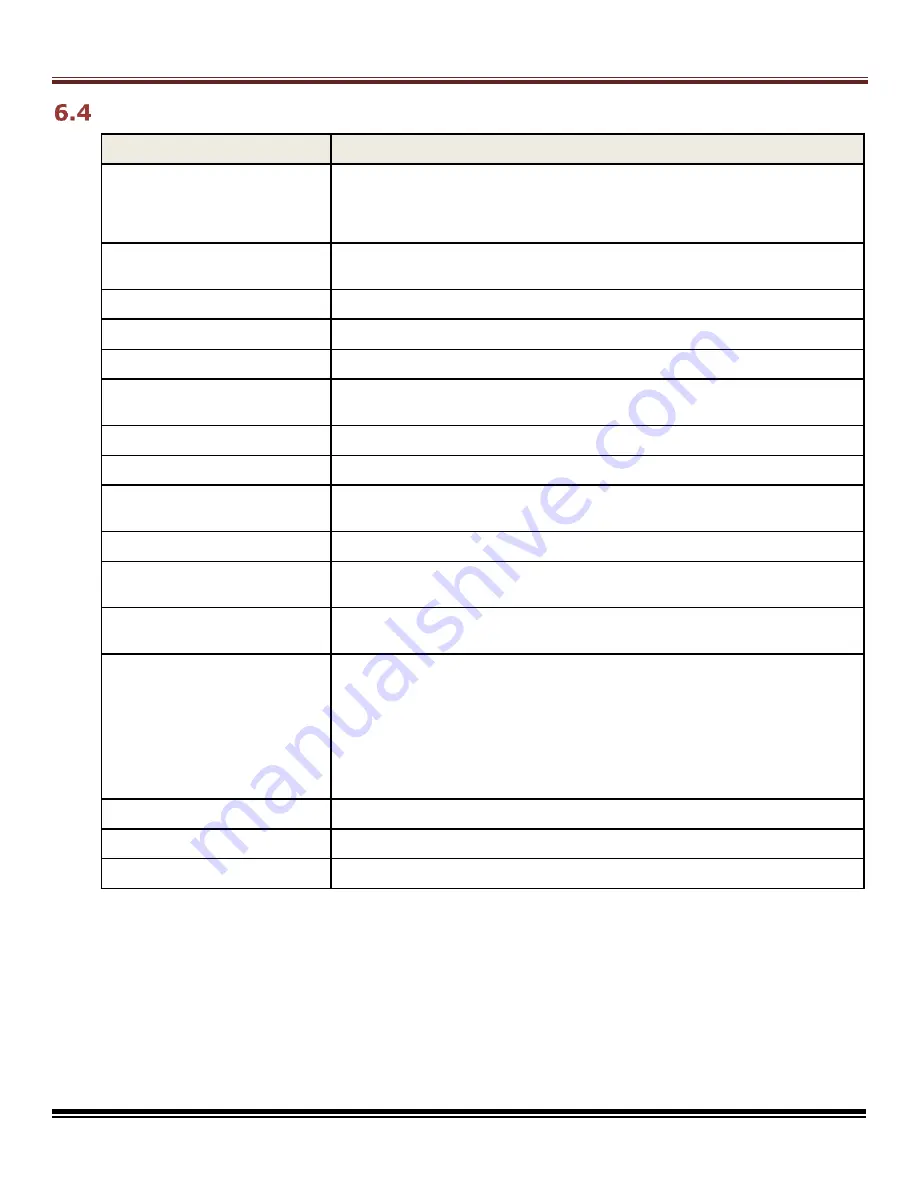
STO
F
UNCTION
S
PECIFICATIONS
Specification
Requirement
Operation
When STO is active, motor current that can cause rotation (or motion in the
case of a linear motor) is not applied. The PWM output is disabled and
cannot source or sink current.
This STO function is defined in IEC-61800-5-2, clause 4.2.2.2
Standards Conformance
IEC-61508-1, IEC-61508-2, IEC-61508-3, IEC-61800-5-2,
ISO 13489-1
Safety Integrity Level
SIL 3
Category & Performance Level
Category 3, Performance Level PL e
Certifications
UL Functional Safety Mark (Pending)
Signals (Functional Safety
Related)
STO-IN1(+), STO-IN1(-), STO-IN2(+), STO-IN2(-),
Frame ground (shield)
Signals (for Disabling)
STO-Bypass, STO-Gnd
STO DC Power AEV/APV
+5 Vdc, typical, +6 Vdc maximum
STO 24V DC Power AEZ/APZ
AEZ/APZ-50, AEZ/APZ-50-C
+24 Vdc, typical, +30 Vdc maximum
STO DC Power Source
SELV or PELV power supply required
STO Input Energize Voltage
Vin-
I ≥ 3.3 Vdc between STO
-INx+ and STO-INx1- (AEV, APV)
Vin-
I ≥
20.0 Vdc between STO-INx+ and STO-INx1- (AEZ, APZ)
STO Input De-energize Voltage Vin-
O ≤ 2.0 Vdc or open between STO
-INx+ and STO-Inx (AEV,APV)
Vin-
O ≤ 13.0 Vdc or open between STO
-INx+ and STO-Inx (AEZ,APZ)-
Input current (typical)
STO-IN1: 1.8 mA, STO-IN2: 3.8 mA
Current flow is into STO-IN1+ and STO-IN2+ and out of STO-IN1- and
STO-IN2-. STO inputs must be connected in parallel when driven from
a single power supply. (AEV,APV)
STO-IN1: 11 mA, STO-IN2: 11 mA
Current flow is into STO-IN1+ and STO-IN2+ and out of STO-IN1- and
STO-IN2-. STO inputs must be connected in parallel when driven from
a single power supply. (AEZ,APZ)
Response Time
rom Vin ≤ 2.0 Vdc or open to P M outputs disabled (off): ≤ 1.5 ms
Type
Opto-isolators, +5 VDC compatible
Maximum cable length
30 m (98.4 ft)







































































