





























88
SM-Universal Encoder Plus User Guide
www.controltechniques.com
Issue Number: 6
A sliding window filter may be applied to the feedback. This is particularly useful in
applications where the feedback is used to give speed feedback for the speed controller
and where the load includes a high inertia, and so the speed controller gains are very
high. Under these conditions, without a filter on the feedback, it is possible for the speed
loop output to change constantly from one current limit to the other and lock the integral
term of the speed controller.
It should be noted that if this filter is used where the speed feedback is provided by an
EndAt or SSI encoder connected directly to the module, it is necessary for the encoder
to provide at least 6 bits of turns information. This is not a problem when the position is
defined by the absolute position from the encoder at initialisation and then accumulated
delta positions (Pr
x.16
=0), however, if the absolute position is taken directly from the
encoder (Pr
x.16
> 0) the encoder must provide at least 6 bits of turns information. If this
filter is not used (i.e. Pr
x.19
=0) turns information from the encoder is not required.
The speed filter can be used to reduce resolution "stepping" problems with low line per
revolution encoder inputs when used through the feedback reference router also.
The resistance value of the thermistor input can be seen in Pr
x.21
. The motor
thermistor resistance value shown in Pr
x.21
is shown in 0.1% of 10k
Ω
units. The
position feedback when used as a reference can be viewed here.
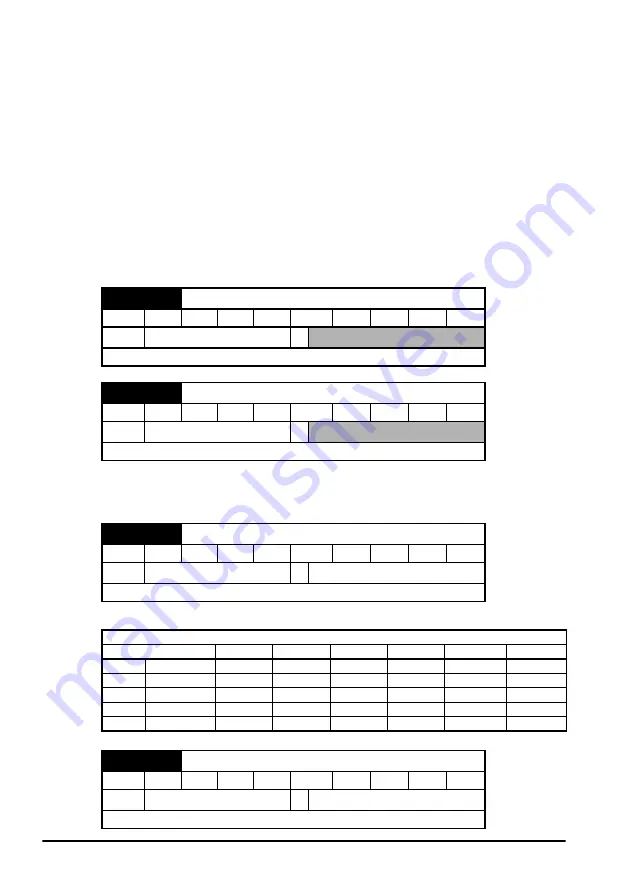
The feedback reference scaling is applied as follows:
x.20
Maximum feedback reference
RW
Uni
US
Ú
0.0 to 40,000.0rpm
Ö
Update rate: Background read
x.21
Feedback reference/ Motor thermistor resistance
RO
Bi
NC
PT
Ú
-100.0 to +100.00%
Ö
Update rate: 4ms write
x.22
Feedback reference scaling
RW
Uni
US
Ú
0.000 to 4.000
Ö
1.000
Update rate: Background read
3000rpm Motor
Parameter
Example 1 Example 2 Example 3 Example 4 Example 5 Example 6
Pr
x.20
Max f/b ref
3000.0
1500.0
6000.0
3000.0
1500.0
6000.0
Pr
x.21
F/b ref
100.0
100.0
50.0
100.0
100.0
50.0
Pr
x.22
F/b ref scaling
1.000
1.000
1.000
0.500
0.500
0.500
Pr
x.23
Destination
Pr
1.21
Pr
1.21
Pr
1.21
Pr
1.21
Pr
1.21
Pr
1.21
Pr
1.21
Preset speed
3000.0
3000.0
1500.0
1500.0
1500.0
750.0
x.23
Feedback reference destination
RW
Uni
DE
US
Ú
00.00 to 21.51
Ö
00.00
Update rate: Read on reset
Содержание SM-Universal Encoder Plus
Страница 73: ...SM Universal Encoder Plus User Guide 73 Issue Number 6 www controltechniques com ...
Страница 112: ...0471 0005 06 ...