





























84
SM-Universal Encoder Plus User Guide
www.controltechniques.com
Issue Number: 6
The following should be noted:
It should be noted that all SINCOS encoders and encoders using communications must
be initialised before their position data can be used. The encoder is automatically
initialised at power-up or when the initialisation parameter (Pr
3.47
) is set to 1.
In addition to using all the above encoders types as position feedback from a motor,
they may be used as a position reference for the drive position controller or a position
controller application in an Solutions Module etc. When a comms only encoder interface
is used, it is possible to instantly change the position by a large number of turns. This
can cause a position error in the drive if the change over a 250
µ
s period appears to
produce a speed of greater than 40,000rpm. Therefore if the EndAt or SSI interface is
used to provide a reference the change over each 250
µ
s sample must not exceed 0.16
turns. If the position is incorrect because the change is too large this can be corrected
by re-initialising the encoder interface, Pr
3.47
.
If an SSI encoder is used, but is not powered from the drive, and the encoder is
powered up after the drive it is possible that the first change of position detected could
be big enough to cause the problem described above. This can be avoided if the
encoder interface is initialised via Pr
3.47
after the encoder has powered up. If the
encoder includes a bit that indicates the status of the power supply the power supply
monitor should be enabled, Pr
3.40
.
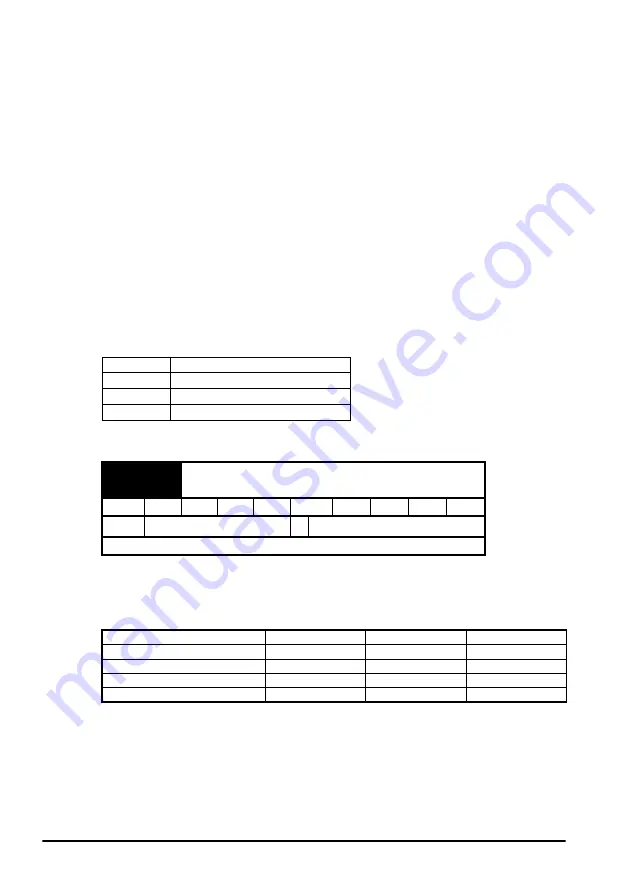
Trips can be enabled/disabled using Pr
3.40
as follows.
This will ensure that the drive remains tripped until the encoder is powered up and the
action of resetting the trip will re-initialise the encoder interface.
Encoder termination select
Ab, Fd, Fr, Ab.SErvo, Fd.SErvo, Fr.SErvo.
The terminations may be enabled/disabled by this parameter as follows:
SC- Not used
Pr
x.16
has no effect
SC.SErvo
U-U\, V-V\, W-W\ and Sin and Cos signals are terminated and cannot be disabled.
SC.HiPEr, SC.EndAt, SC.SSI - Rotary encoder select
If Pr
x.16
is set to 1 or 2 the encoder is a rotary encoder and the following applies
Bit
Function
0
Wire break detect
1
Phase error detect
2
SSI power supply bit monitor
x.16
Encoder termination/rotary encoder select/comms
only encoder mode
RW
Txt
US
Ú
0 to 2
Ö
1
Update rate: Background read
Encoder input
Pr x.16=0
Pr x.16=1
Pr x.16=2
A-A\
Disabled
Enabled
Enabled
B-B\
Disabled
Enabled
Enabled
Z-Z\
Disabled
Disabled
Enabled
U-U\, V-V\, W-W\
Enabled
Enabled
Enabled
Содержание SM-Universal Encoder Plus
Страница 73: ...SM Universal Encoder Plus User Guide 73 Issue Number 6 www controltechniques com ...
Страница 112: ...0471 0005 06 ...