
























Startup
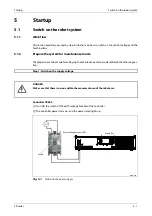
Switch on the robot system
FR series
5 - 3
5.1.3 Changing
controller
type
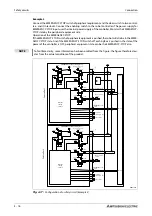
This section shows how to change a controller's type.
Changing from CR800-D to CR800-R
Start up as CR800-D. (Connection with robot is necessary.)
Change the setting value of parameter (IQRMODE) from 0 to 1. Power turn off.
Set R16RTCPU SW is 4, and connect R16RTCPU to CR800. Power turn on.
R002760E
Fig. 5-3:
Connect the robot to the controller CR800-D
R002761E
Fig. 5-4:
Change parameter IQRMODE from 0 to 1
R002762E
Fig. 5-5:
Set SW to 4
RV-7FRL-D
RV-7FRL-D
➡
RV-7FRL-R
IQRMODE:
(0: D-type, 1: R-type)
RV-7FRL-R
R16RTCPU
SW = 4
Summary of Contents for MELFA RH-FRH-D
Page 2: ......
Page 4: ......
Page 6: ......
Page 16: ...Contents X ...
Page 22: ...Environmental conditions for operation Introduction 1 6 ...
Page 70: ...Grounding the robot system Installation 3 32 ...
Page 90: ...Teaching Box connection Connection 4 20 ...
Page 96: ...Switch on the robot system Startup 5 6 ...
Page 128: ...Dimensions Appendix A 18 ...
Page 130: ...A 20 Index Appendix ...
Page 131: ......
Page 132: ......
Page 133: ......
Page 134: ......
Page 135: ......
Page 136: ......
Page 137: ......
Page 138: ......
Page 139: ......
Page 140: ......
Page 141: ......
Page 142: ......
Page 143: ......
Page 144: ......
Page 145: ......
Page 146: ......
Page 147: ......
Page 148: ......
Page 149: ......
Page 150: ......
Page 151: ......
Page 152: ......
Page 153: ......
Page 154: ......
Page 155: ......
Page 156: ......
Page 157: ......
Page 158: ......
Page 159: ......
Page 160: ......
Page 161: ......
Page 162: ......
Page 163: ......
Page 164: ......
Page 165: ......