




























33
system doesn’t become oscillating and the dynamic
response is good.
3
)
Adjust the proportional gain (A5.04) and integral
time(A5.05) when running at low speed, ensure the
system doesn’t become oscillating and the dynamic
response is good.
4
.
Get the reference torque current through a delay filter
for the output of speed regulator.A5.03 and A5.06 are
the time constant of output filter for ASR1 and ASR2.
A5.08~A5.09
Reserved
Reserved function
A5.10 Driving torque limit 0.0%~+300.0%
【
180.0%
】
A5.11 Braking torque limit 0.0%~+300.0%
【
180.0%
】
Driving torque limit is the torque limit in motoring
condition.
Braking torque limit is the torque limit in
generating condition
In setting value, 100% is corresponding to drive’s
rated torque.
A5.12 ~A5.16
Reserved
Reserved function
A5.17 ACR-P
1
~
5000
【
1000
】
A5.18 ACR-I
0.5
~
100.0mS
【
8.0ms
】
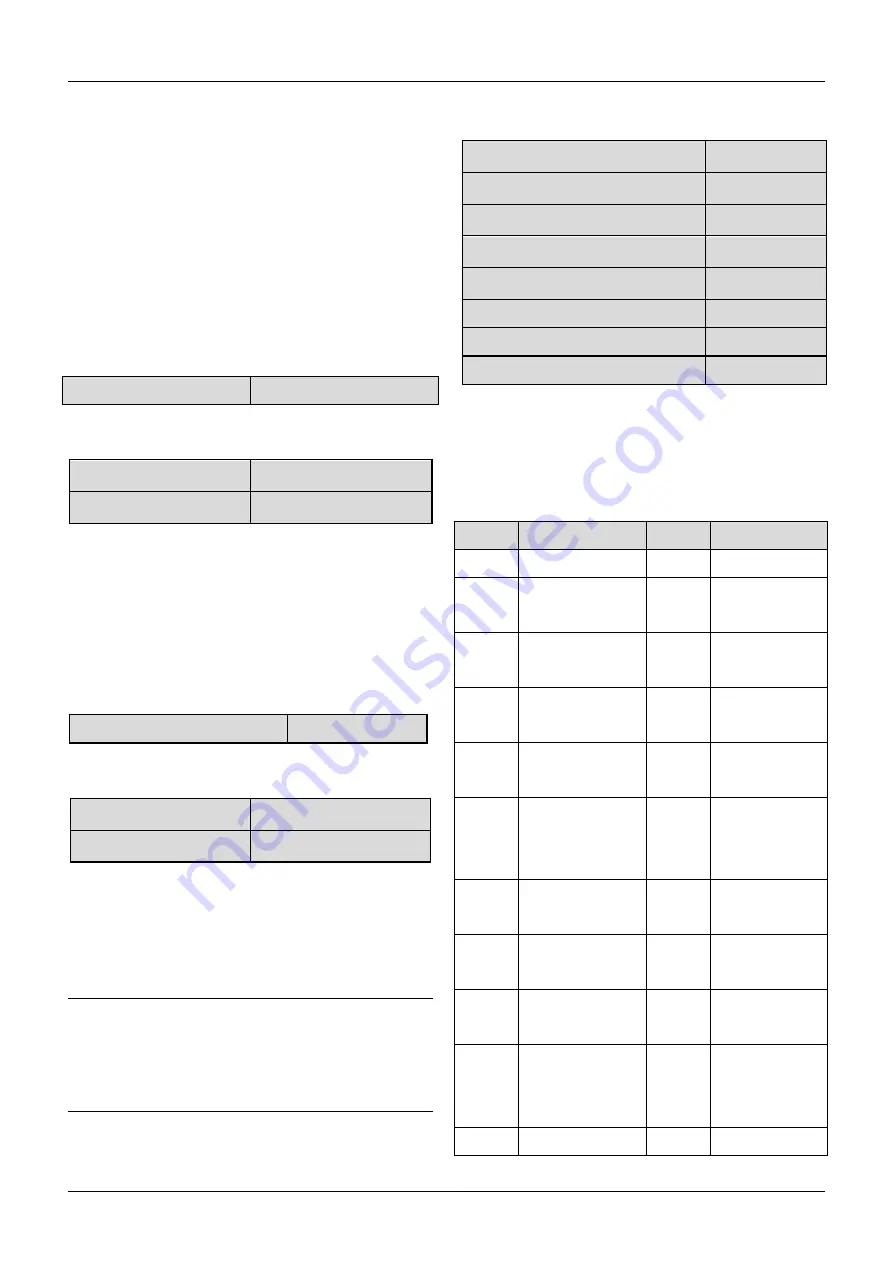
A5.17 and A5.18 are the parameters for PI regulator of
current loop.Increasing P or decreasing I of current loop
can speed up the dynamic response of torque.Decreasing
P or increasing I can enhance the system’s stability.
Note:
For most applications, there is no need to adjust the PI
parameters of current loop, so the users are suggested to
change these parameters carefully.
6.7 Group A6
A6.00 Multi-function terminal X1
0
~
41
【
0
】
A6.01 Multi-function terminal X2
0
~
41
【
0
】
A6.02 Multi-function terminal X3
0
~
41
【
0
】
A6.03 Multi-function terminal X4
0
~
41
【
0
】
A6.04 Multi-function terminal X5
0
~
41
【
0
】
A6.05
Reserved
A6.06
Reserved
A6.07: Reserved
The functions of multi-function input terminal X1~X5
are extensive. You can select functions of X1~X5
according to your application by setting A6.00~A6.04.
Refer to Table 6-2.
Table 6-2 Multi-function selection
Setting
Function
Setting
Function
0
No function
1
Forward
2
Reverse
3
Forward jog
operation
4
Reverse jog
operation
5
3-wire operation
control
6
External RESET
signal input
7
External fault
signal input
8
External interrupt
signal input
9
Drive operation
prohibit
10
External stop
command
11
DC injection
braking
command
12
Coast to stop
13
Frequency ramp
up (UP)
14
Frequency ramp
down (DN)
15
Switch to panel
control
16
Switch to terminal
control
17
Reserved
18
Main reference
frequency via AI1
19
Main reference
frequency via
AI2
20
Reserved
21
Main reference







































































