





























Chapter 4
CIP Axis Attributes
228
Rockwell Automation Publication MOTION-RM003I-EN-P - February 2018
SLAT Max Speed/Torque Mode
For SLAT Max Speed/Torque mode (SLAT Configuration = 2) the SLAT
control operates similar to SLAT Min Speed/Torque mode, except that the signs
have changed to allow the feature to work in the negative direction.
Max Mode
The active 'Max' select function will select the larger, or Max function, of the
Velocity Loop Output or the Torque Command. The Velocity Command value is
a negative quantity and so when the motor speed is mechanically limited, the
Velocity Error is a negative value, and the Velocity Loop Output is a saturated
(limited) to a negative value. The Torque Command is also negative, but smaller
in magnitude, so it becomes selected by the 'Max' operation.
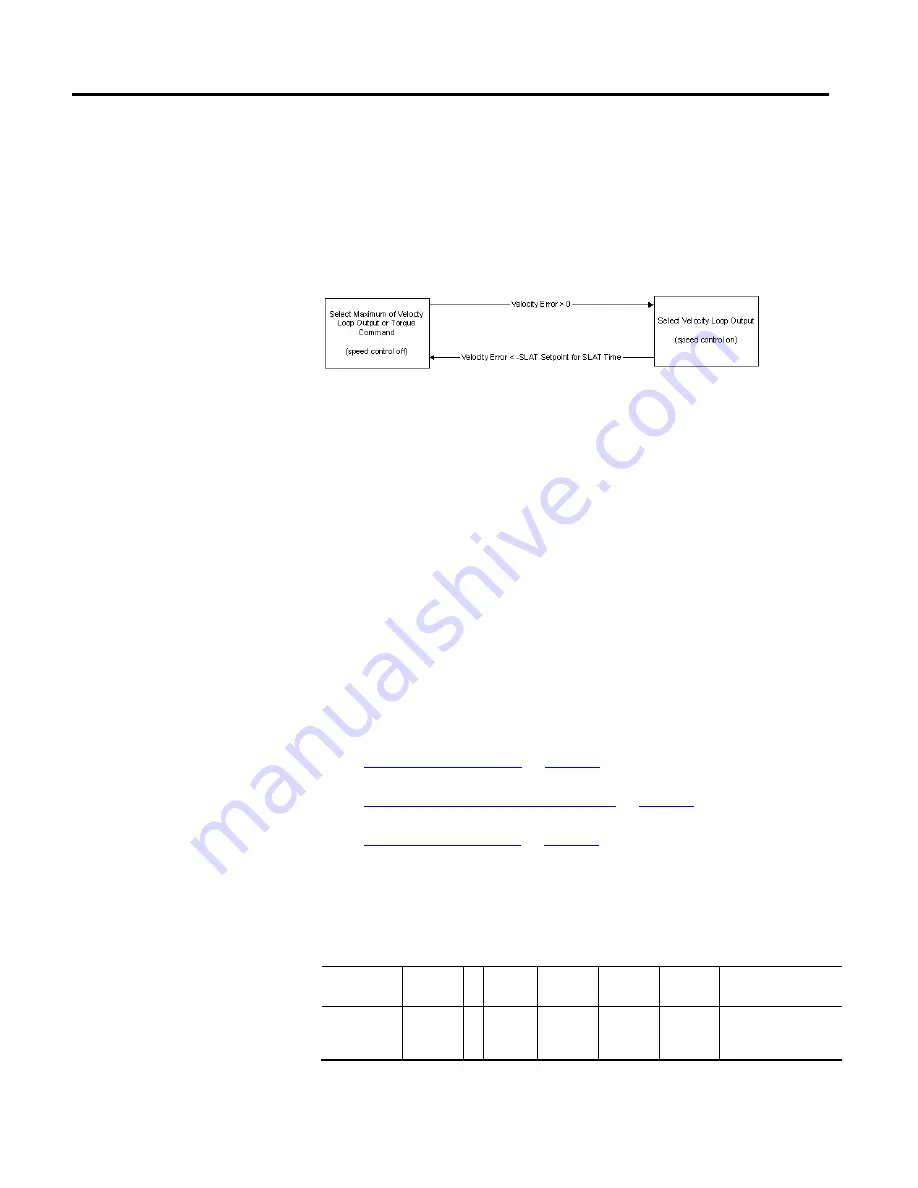
The forced transition to speed control occurs when the Velocity Error value
becomes positive such as when the mechanical limitation is removed. A preset of
the velocity loop's integral term occurs, as before.
When, by restoring the mechanical constraint, the Velocity Error becomes
negative again and less than the negated SLAT Set-point parameter value for a
SLAT Time delay, speed control is turned off and the 'Max' select operation
becomes active.
See also
Position Loop Configuration Attributes
These are the velocity control signal related attributes associated with a Motion
Control Axis.
Velocity Trim
Usage
Access
T Data
Type
Default
Min
Max
Semantics of Values
Required - FPV
Set/SSV
T REAL
0
-maxspd
maxspd
Velocity Units
Additional velocity command added to the velocity loop summing junction.
Velocity Loop Signal Attributes