





























Integrated Motion on the EtherNet/IP Network
Chapter 1
Rockwell Automation Publication MOTION-RM003I-EN-P - February 2018
17
The Control Modes are:
•
B - Bus Power Converters (No Control Mode, No Control Method)
•
E - Encoder, Feedback Only (No Control Mode, No Control Method)
•
P - Position Control Mode
•
V - Velocity Control Mode
•
T - Torque Control Mode
•
F - Velocity Control Mode
Control Nomenclature
Linear and rotary control applications can affect the control nomenclature. While
rotary applications speak of torque and inertia, linear applications speak of force
and mass. When we refer to rotary nomenclature, the defined behavior can
generally be applied to linear applications by substituting the terms, force for
torque and mass for inertia. With that understanding, we use torque rather than
force in the control mode diagrams without loss of generality.
See also
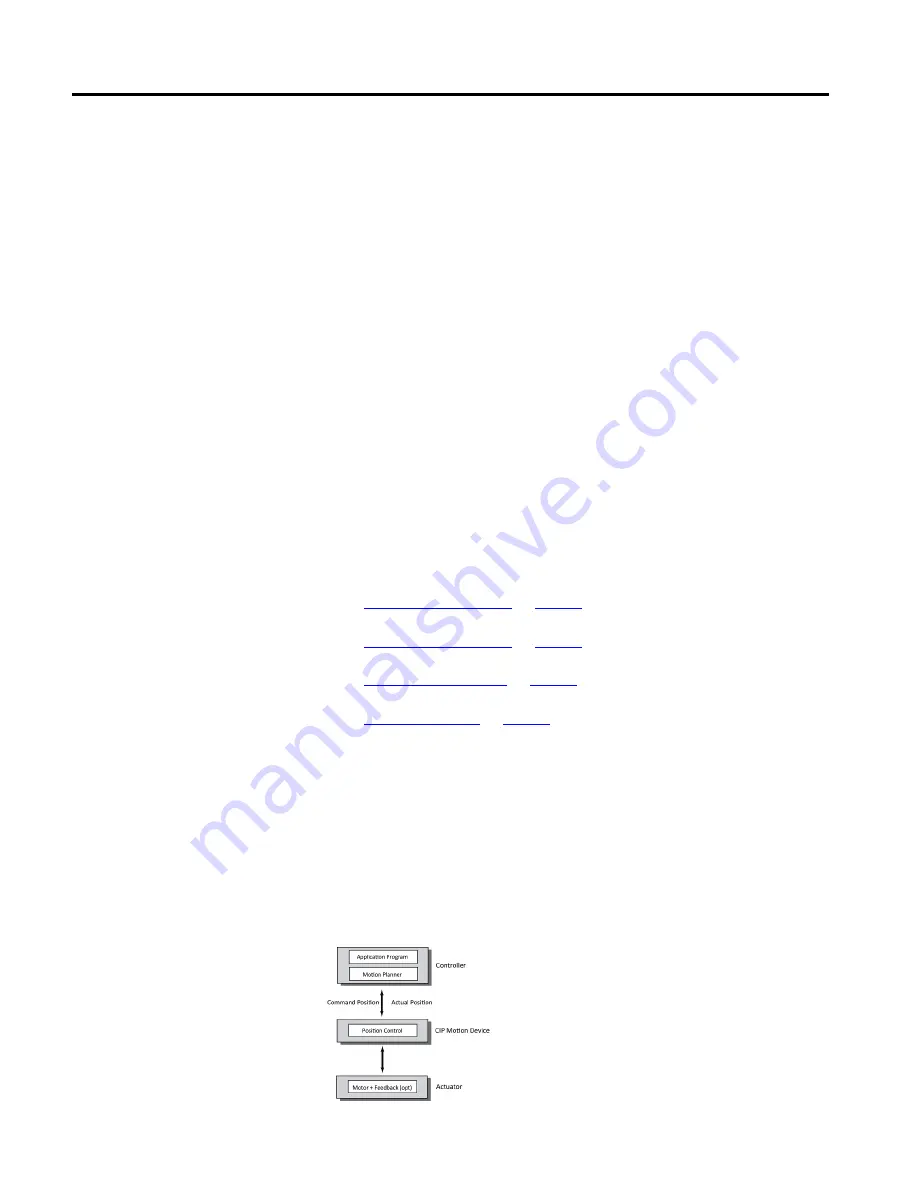
In Position Control application mode either the application control program
(command execution function) or the motion planner (move trajectory control
function) provide a setpoint value to the CIP Motion device using the cyclic data
connection. The Position Control method can be either open loop or closed loop.
Open Loop Position Control Method
A device configured for open loop position control applies to a class of drive
devices called stepper drives. This type of drive is illustrated below.
Position Control Mode