





























22
CHAPTER2 PROFIBUS Unit
2-7-4
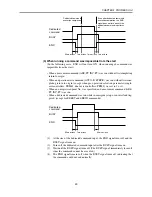
Interlock (LOCK)
These are inputs to temporarily stop robot movement.
Robot operation can be stopped by setting this input to OFF during running of dedicated
commands from the I/O, during running of a program by HPB (or personal computer), or
during return to origin. (Of course, the program operation also stops.)
When this input is OFF however, dedicated commands from the I/O and running of
programs from the HPB (or personal computer) as well as origin return are all disabled.
Therefore you should normally keep this input at ON.
The only exceptions to this, are the RESET and SERVO commands whose inputs are
enabled regardless of whether this interlock input is ON or OFF.
Once the interlock is set to OFF, the robot remains stopped until another command is
input (AUTO-R, ORG-S) even if the interlock is set to ON again.
M E M O
M E M O
The interlock input on the parallel I/O of the controller is also always valid. Accord-
ingly, the interlock will be activated to prevent the automatic operation and others if
either of two interlock inputs is OFF. For automatic operation and others, it is neces-
sary to surely keep both interlock inputs ON. (On the SRCP/SRCD series, the paral-
lel I/O interlock can be disabled by the parameter setting. For more details, refer to
"2-4 Parallel I/O connector".)
2-7-5
Emergency stop input (EMG)
Use this EMG input when you want to set the robot to emergency stop. Setting this input
to OFF cuts off the servo power and turns off the servo.
To restart operation, first set this input to ON, then input the servo recovery command
(SERVO) after checking that the READY output is ON. The servo turns ON and the
robot can now be operated.
When the HPB (or personal computer) is connected, you can reset from emergency stop
by the HPB (or personal computer) operation.
The emergency stop input in the PROFIBUS unit is only controlled by the
software and does not constitute a complete safety circuit. So installing a
hardware interlock circuit for emergency stop utilizing the emergency stop input
pins installed on the parallel I/O of the controller is strongly recommended.







































































