





























18
CHAPTER2 PROFIBUS Unit
■
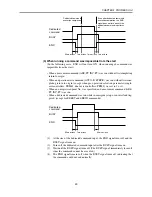
Point movement command with absolute (ABS-PT)
When origin point coordinates are set at 0, this command moves the robot to a posi-
tion specified in data by point No. (See “2-7-3 General-purpose inputs”) specified by
SI200 through SI209, and at a speed specified by SI210 and SI211. On dual-axis
controllers, the axis to be moved can be specified with SI213, SI214 by making PRM10
varid.
!
CAUTION
When executing this command (ABS-PT), the status of SI200 and SI211 must be
checked in advance. SI213 and SI214 must also be checked when specifying the
axis.
■
Point movement command with incremental (INC-PT)
This command moves the robot from the current position to a position specified in
data for point No. specified by SI200 through SI209, and at a speed specified by
SI210 and SI211. On dual-axis controllers, the movement axis can be specified with
SI213, SI214 by enabling PRM10.
M E M O
M E M O
Current position is not necessarily the actual position of robot. It is the data of the
current position that is saved internally in the controller. On each execution of a move-
ment command, the point that was the target position changes to the current position.
Therefore, even if interlock is triggered during execution of the relative movement
command, the operation restarts from the point where the robot is stopped, by execut-
ing the same relative movement command again. (This does not constitute a relative
movement based on the interlock-stopped point.)
Likewise, when the robot is moved manually to another position after executing the
robot movement command, the relative movement command which is subsequently
executed does not make a relative movement from the actual position of the robot.
Instead, the robot makes a relative movement based on the target position of the
previous robot movement command. Please bear this movement in mind.
The current position and robot position differ when:
•
When emergency stop or interlock (LOCK) is applied during axis
movement;
•
A communication command “^C” (movement interruption) is sent
during axis movement;
•
The axis is moved manually; and
•
The axis is move manually in the servo off state (including emer-
gency stop state).
!
CAUTION
S1200 to SI211 status must be checked in advance when running INC-PT. SI213 and
SI214 must also be checked when specifying the axis.
■
Automatic run start command (AUTO-R)
The program is run continuously, starting from the current step.
All tasks are executed when the multi-task program is running.
■
Step run start command (STEP-R)
The program is run step by step, starting from the current step.
The multi-task program only executes the selected task.







































































