





























100
CHAPTER2 PROFIBUS Unit
2-12-4 Remote command details (data handling)
(1) Current position read ............................................................. Code 0201
The current positions of all axes or specified axes are read.
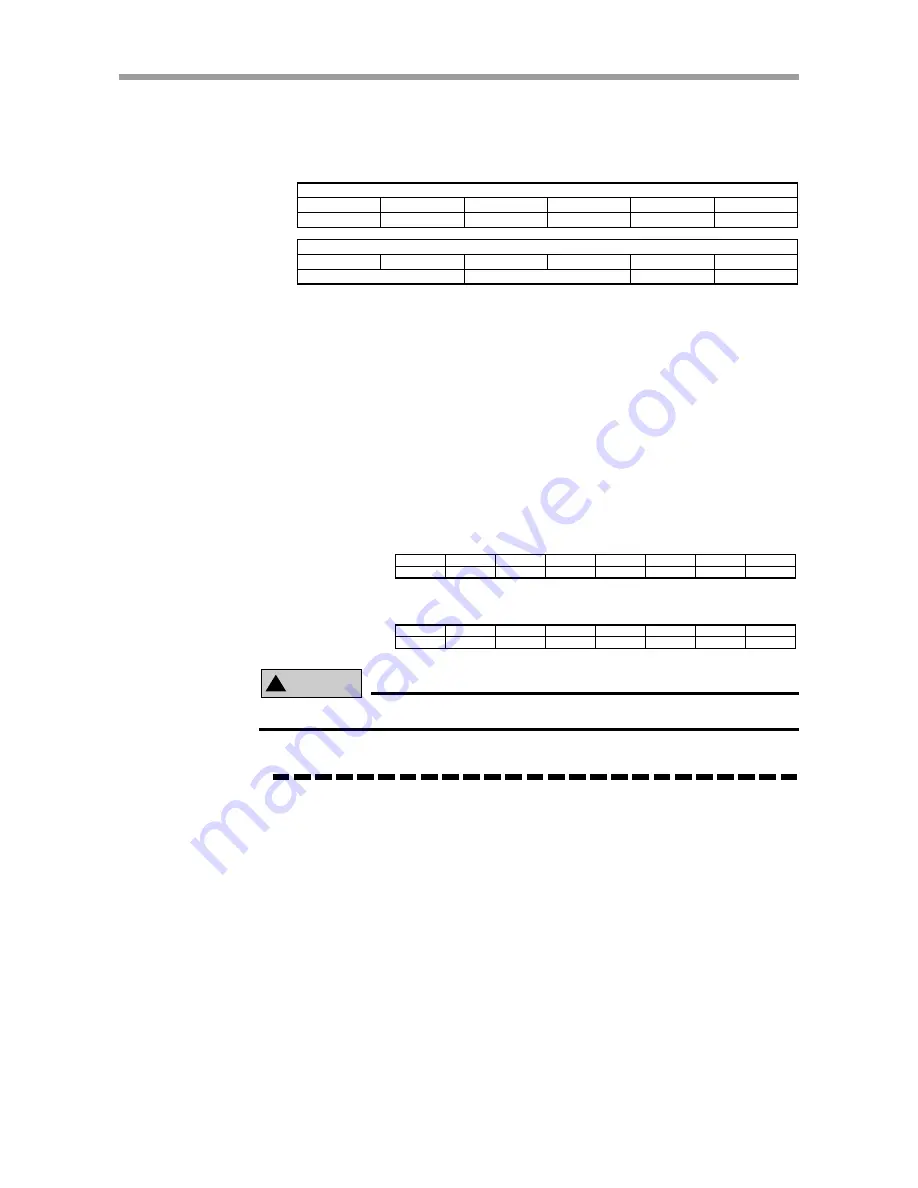
Command option
QWn+22
QWn+20
QWn+18
QWn+16
QWn+14 QWn+12
Axis
Command response
IWm+22
IWm+20
IWm+18
IWm+16
IWm+14 IWm+12
Y axis position
X axis position
(Details)
Axis:
0 means all axes, 1 means X axis and 2 means Y axis. On dual-axis
controllers, all axes are also specified when 3 is set.
On single-axis controllers, 0 or 1 alone can be specified.
Axis position:
The current position of the robot is indicated (unit: 0.01mm). When
the robot is set at the rotary axis, the unit of the movement position
is 0.01 degrees.
Single-axis controllers does not use IWm+20 to IWm+22.
Similarly, writing is not applied to the unspecified axis with the
command option.
(Example)
Transmission example 1:
The current position information of all axes is read.
QWn+22 QWn+20 QWn+18 QWn+16 QWn+14 QWn+12 QWn+10
QWn+8
0000
0000
0000
0000
0000
0000
0000
0201
Response example 1:
The current position of the robot is X=321.05 and Y=100.15.
IWm+22
IWm+20
IWm+18
IWm+16
IWm+14 IWm+12 IWm+10
IWm+8
0000
271F
0000
7D69
0000
0000
0000
0200
!
CAUTION
Reset the current position indication mode, and execute the command.
M E M O
M E M O
If any robot position cannot be judged due to the incomplete origin state, cable break-
age, etc., the robot position is not determined.







































































